Author: Francesco Braghin
-

Bridging Simulation and Reality for Autonomous Underwater Vehicles
Autonomous Underwater Vehicles (AUV) are subject to highly non-linear hydrodynamic forces, significant parametric uncertainty, and unpredictable environmental disturbances, all of which make robust low-level control a persistent open challenge. This thesis investigates control strategies for AUV motion control with a focus on robustness, the ability of a controller to maintain acceptable performance despite uncertainty in…
-
Real-Time State Estimation and Quench Prevention in Superconducting Magnets
This thesis focuses on the development of a real-time state estimation system for superconducting magnets, aimed at detecting early signs of instability and preventing quench events. The activity will investigate the use of advanced estimation techniques to reconstruct the internal electro-thermal state of a superconducting coil from available sensor measurements. The student will develop numerical…
-
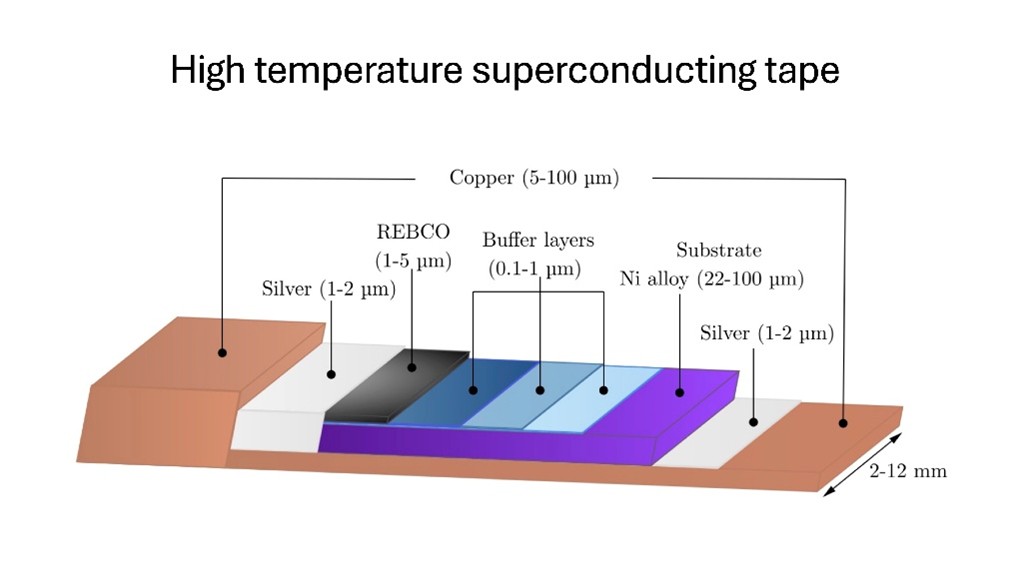
3D-Printed and Topology-Optimized Structures for Superconducting Magnets
This thesis focuses on the design, structural analysis and topology optimization of advanced components for superconducting tapes and superconducting magnets. The activity will explore how additive manufacturing can be used to create lightweight, mechanically efficient and highly customized support structures able to operate under the demanding conditions of high-field superconducting systems. The student will investigate…
-
Mechanical Design of Support Structures for High-Field Superconducting Magnets
This thesis focuses on the mechanical design and numerical assessment of support structures for next-generation high-field superconducting magnets, operating in the 14–20 T range within CERN-related accelerator magnet development. The thesis will be carried out in collaboration with INFN, providing the student with direct exposure to advanced research activities in superconducting magnet technologies. These systems…
-
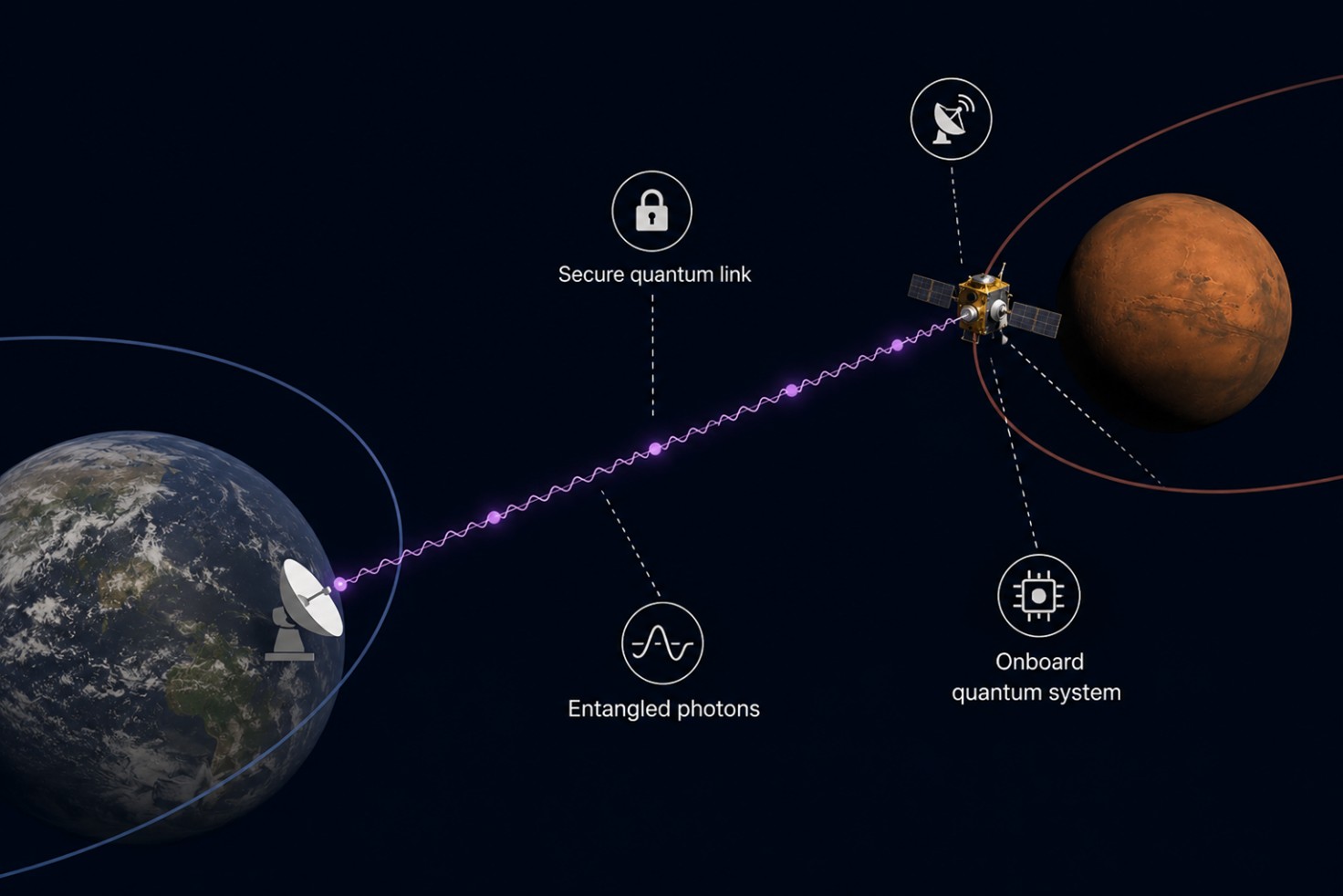
AI-Assisted Quantum Error Correction for Space-Based Quantum Systems
Quantum technologies are expected to play a central role in future space infrastructures, enabling ultra-secure communications, distributed sensing, autonomous navigation, and next-generation onboard computing. One of the main challenges preventing the deployment of practical quantum systems is their extreme sensitivity to noise, decoherence, radiation effects, and hardware imperfections. Quantum Error Correction (QEC) is therefore a…
-

Autonomous Operations for Venus Aerobot
Venus is emerging as one of the most compelling targets for planetary exploration. Unlike traditional landers, future concepts envision long-duration aerial robotic platforms (“aerobots”) capable of navigating the Venusian atmosphere for weeks or even months, operating in cloud layers where temperature and pressure are Earth-like. Recent JPL developments include variable-altitude aerobots able to actively control…
-
Astrodynamics and Planetary Robotics for Autonomous Space Exploration
Future planetary missions will increasingly depend on highly autonomous robotic systems capable of navigating, exploring, and making decisions with minimal human supervision. This thesis focuses on advanced astrodynamics and planetary robotics technologies inspired by ongoing developments at NASA Jet Propulsion Laboratory (JPL). The student will investigate trajectory planning, autonomous navigation, terrain-aware guidance, and robotic decision-making…
-

Advanced Wavefront Sensing and Control for Segmented Space Telescopes
This thesis will focus on the development and validation of advanced wavefront sensing and control strategies for future segmented aperture space telescopes. The work will build on the JPL IRIS testbed, a 1-meter segmented telescope platform equipped with laser metrology, rigid-body actuators, a deformable mirror, and phase-retrieval cameras. The student will investigate how real-time control…
-

Closed-Loop, Sensorless Position Control Algorithm for Directional Proportional Electrohydraulic Valves
The objective of this thesis is the development of an innovative closed-loop, sensorless position control algorithm for proportional electrohydraulic valves, based on the indirect estimation of the electromagnet inductance, in order to ensure good control accuracy and repeatability. This approach makes it possible to eliminate the use of an LVDT position transducer, resulting in a…
-
Design and testing of novel adaptive control systems for UAVs
The Advanced Control Systems Lab at Virginia Tech is seeking enthusiastic graduate students (M.S. and Ph.D. level) interested in a research experience in the United States. Research projects involve the design and testing of novel adaptive control systems. Numerical simulations will be performed in a high-fidelity simulation environment for UAVs, and experiments will be…