Author: Francesco Braghin
-
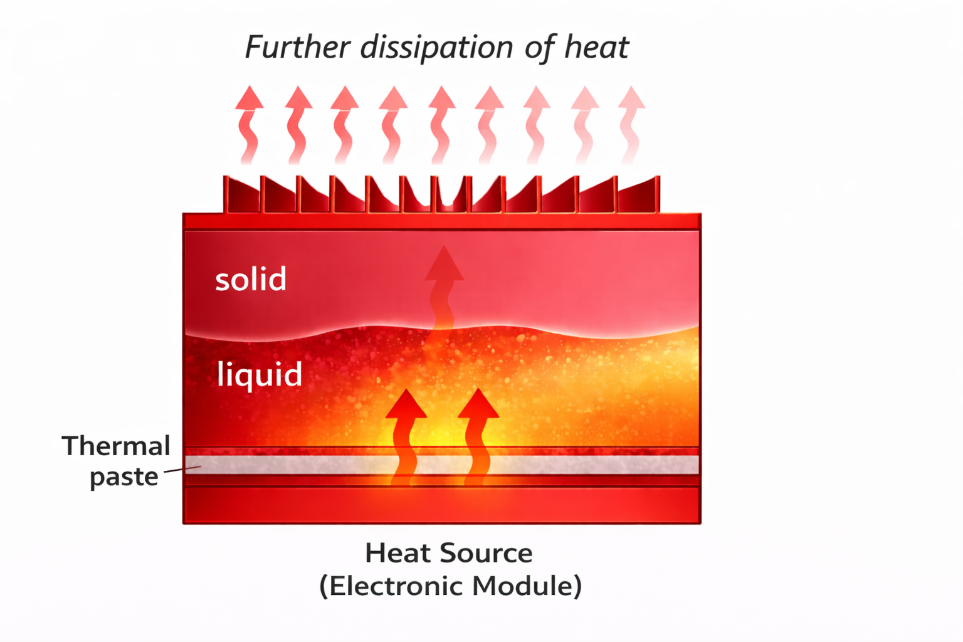
PCM–Coolant Heat Exchanger Design for Automotive Electronics
The objective of this thesis is to design and dimension a phase-change-material-to-coolant heat exchanger for thermal regulation of automotive printed circuit boards operating under transient loads. The work will involve analytical modelling, CFD simulations, transient heat transfer analysis, material selection, and integration studies within vehicle cooling loops. The aim is to enhance thermal stability while
-
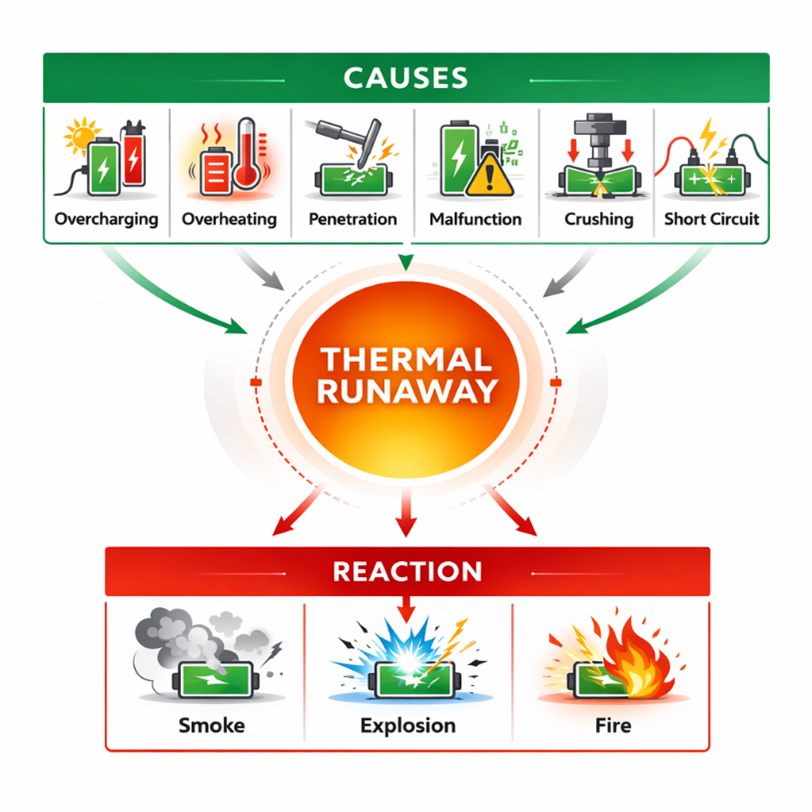
Advanced Mitigation Strategies for Battery Thermal Runaway
This thesis investigates passive and active strategies to mitigate thermal runaway propagation in lithium-ion battery packs for automotive applications. The research will include thermal modelling, material barrier analysis, active cooling countermeasures, gas venting systems, and integration considerations within battery modules. Safety standards, regulatory frameworks, and validation procedures will also be considered. The thesis will be
-
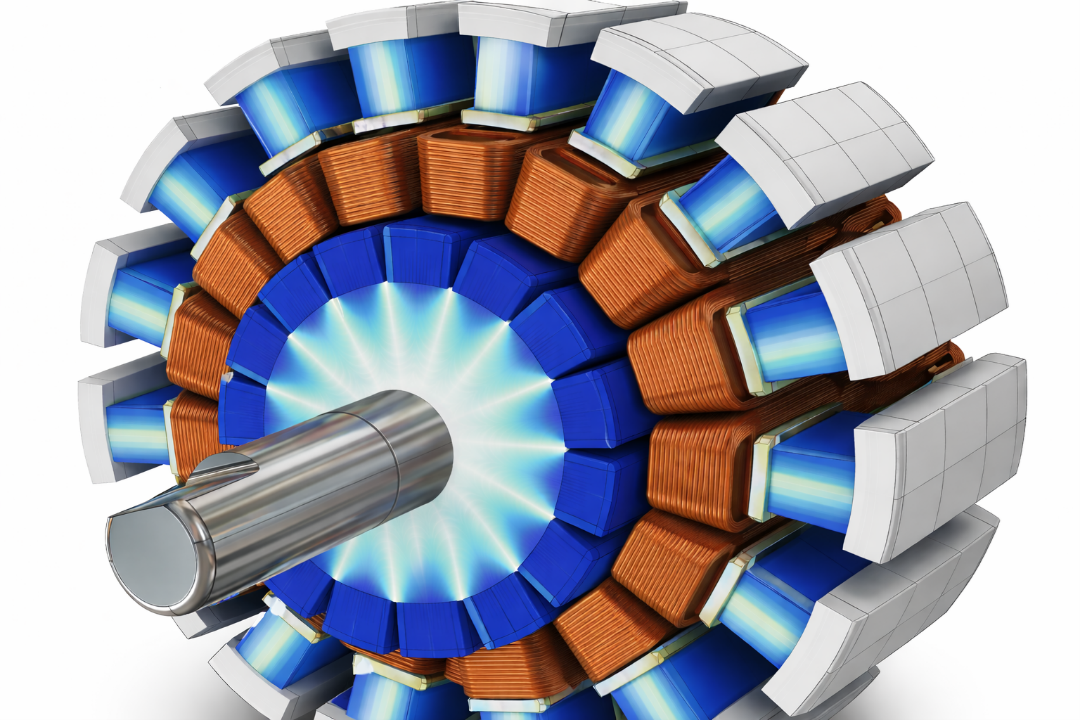
Magnet Optimization in High-Performance Electric Motors
This research focuses on reducing rare-earth magnet content in automotive electric motors while preserving torque density, efficiency, and overall performance. The thesis will explore alternative rotor topologies, flux concentration strategies, advanced control algorithms, and electromagnetic optimization through finite element analysis. Thermal and mechanical implications of magnet reduction will also be evaluated. The work will be
-
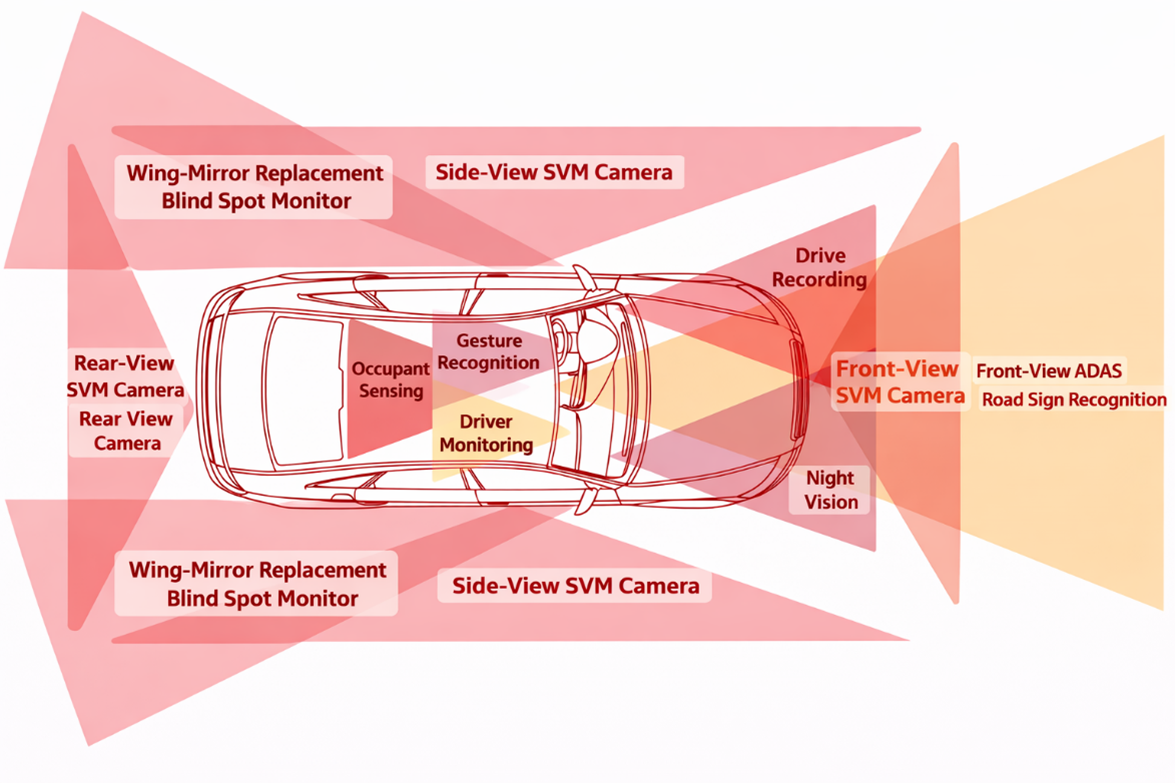
Secure Wireless Power and Data Transmission for ADAS Cameras
This thesis explores the feasibility of replacing wired connections to ADAS cameras with secure wireless transmission of both power and high-bandwidth data streams (including CAN and raw video). The research will investigate wireless power transfer technologies, electromagnetic compatibility, signal integrity, cybersecurity requirements, and functional safety compliance under automotive standards. System-level modelling will evaluate efficiency, reliability,
-

Invisible Antenna Integration Architectures for ADAS Systems
The objective of this thesis is to investigate alternative antenna integration concepts that eliminate current windshield-mounted antennas located near ADAS cameras. The research will explore electromagnetic compatibility, signal propagation modelling, packaging constraints, and regulatory compliance aspects. The work will assess performance trade-offs between signal strength, sensor visibility, structural integration, and vehicle design requirements. Prototypes or
-

Next-Generation Automotive Thermal Management Technologies
This thesis aims to systematically explore innovative alternatives to conventional automotive cooling systems. The thesis will include a structured state-of-the-art review of emerging thermal management technologies such as immersion cooling, two-phase cooling, and high-performance heat exchangers. The study will evaluate technological feasibility, thermal performance, scalability, packaging constraints, sustainability implications, and cost competitiveness. A comparative framework
-
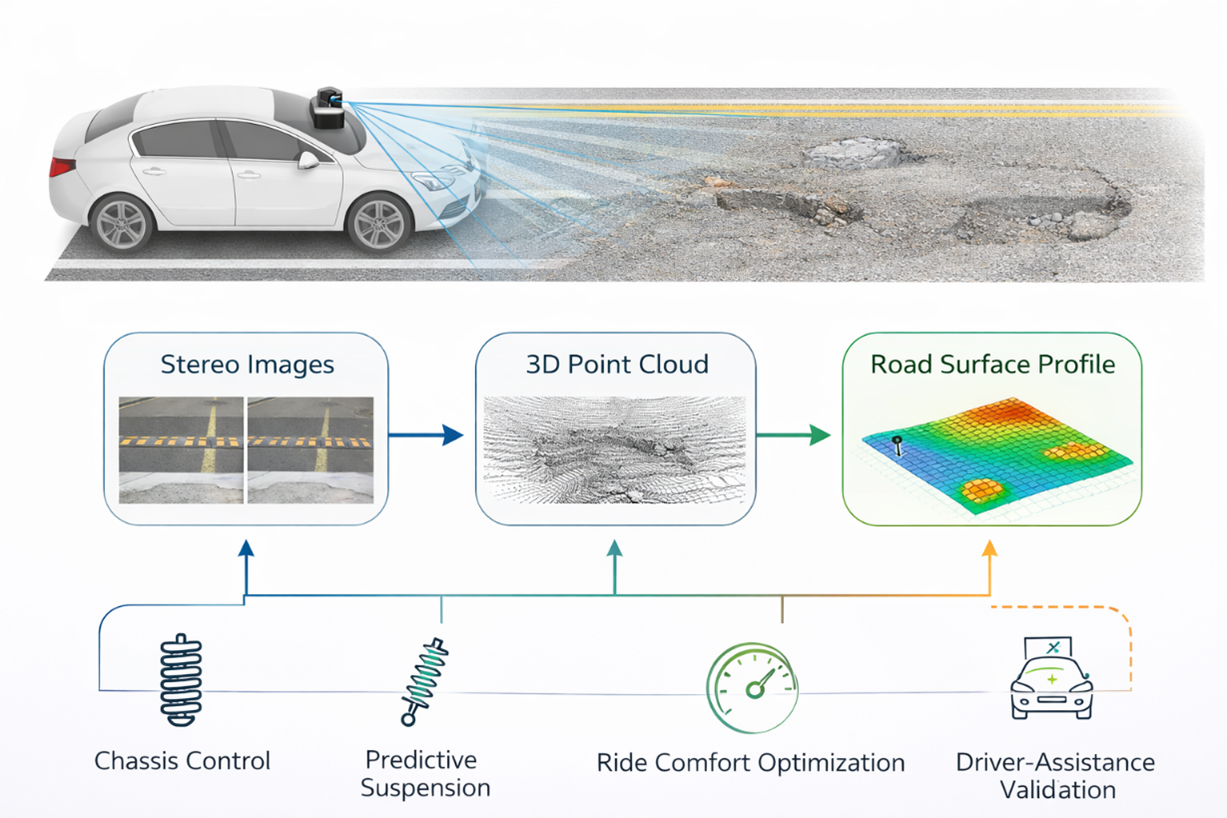
3D Point Cloud–Based Road Surface Profiling for Intelligent Vehicles
The purpose of this thesis is to design and train an algorithm capable of extracting detailed road surface profiles from 3D LiDAR point cloud data. The research will investigate advanced filtering techniques, surface reconstruction methods, and machine learning models to accurately detect road irregularities such as bumps, potholes, and uneven surfaces. The reconstructed road profile
-

Predictive Fleet Intelligence for Battery Charge Optimization
This thesis aims to develop predictive models capable of anticipating customer driving and charging behaviour based on large-scale fleet telematics data. By leveraging machine learning techniques and statistical analysis, the research will extract meaningful patterns from historical usage data, including trip frequency, parking duration, charging cycles, environmental conditions, and driving styles. The objective is to
-

Optimal Control of Flow-Induced TRAPs Using Spinning Robots
This project combines optimal control, fluid mechanics, and dynamical systems to design and steer transport and accumulation regions (TRAPs) in fluid environments using spinning robots as flow actuators. By controlling rotation speed, direction, and robot coordination, we aim to generate tailored flow structures that selectively trap floating particles or swimming microorganisms. The theoretical component builds
-
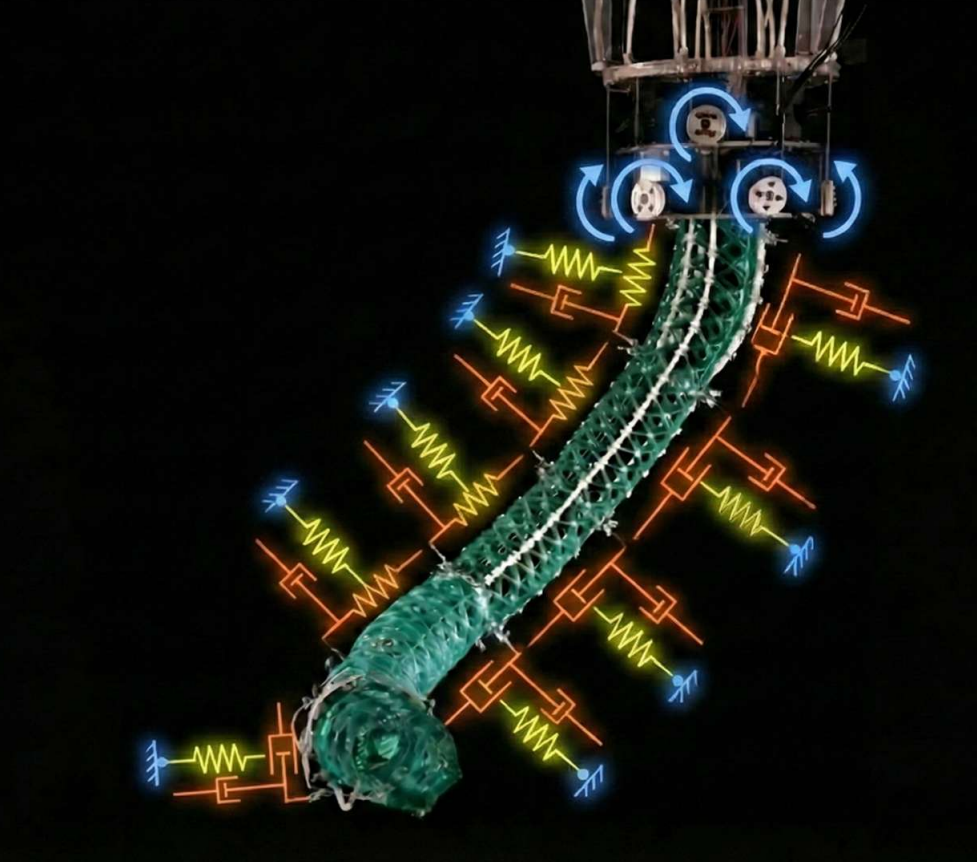
Virtual Model Control of a Soft Compliant Manipulator
Soft continuum robotic arms offer unparalleled dexterity and compliance over rigid bodies, thus facilitating safe and robust interactions with environments. These characteristics make them ideal for diverse applications, such as collaborative robotics or medical contexts. However, due to their virtually infinite degrees of freedom, control of these systems has always been a challenge. Various control