-
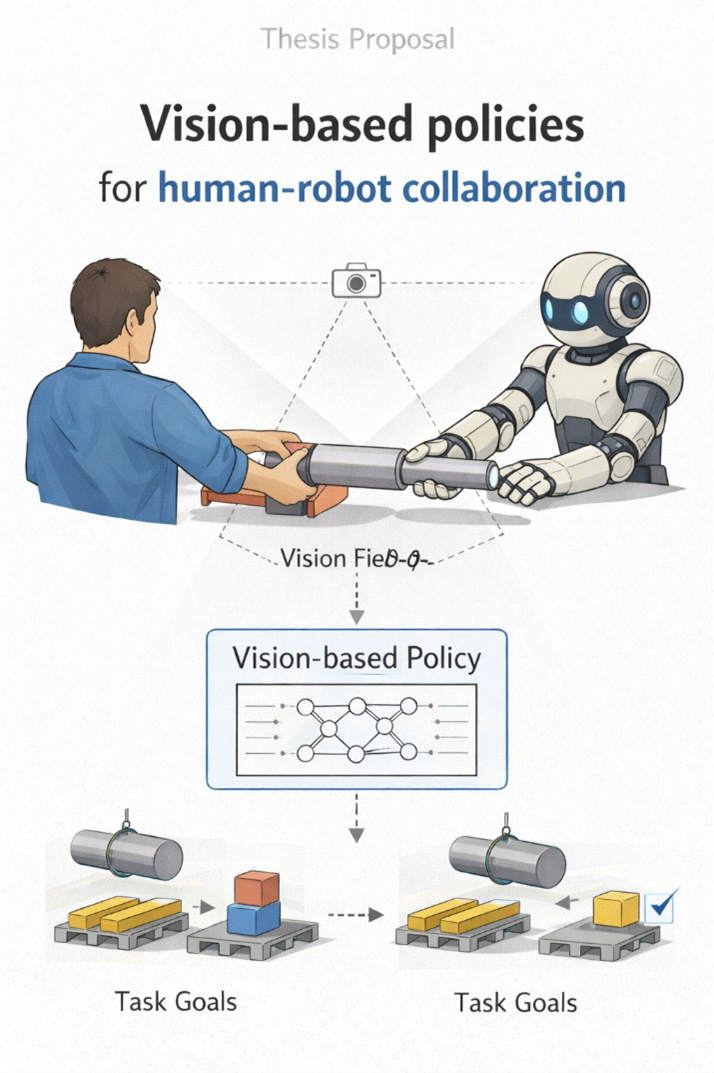
Vision-based policies for human-robot collaboration
This thesis investigates vision-based policies (e.g., VLAs, diffusion policy, flow matching) for human-robot collaboration. Despite standard collaborative controllers which make only use of the robot and (if available) human states, vision-based policies are trained additionally on images captured during the task execution. This provides the robot with the possibility to embed the perception of the environment directly into its controller. However, such policies are strongly dependent on the training dataset (e.g., background) and are commonly only available for autonomous static tasks. In this thesis, we would like to extend vision-based policies to dynamic environments and, in particular, to human-robot collaboration.… Read more
-

Systematic Validation and Expansion of Thermal Imaging Algorithms for Muscular Activity and Fatigue Monitoring
Contacts: Marta Gandolla, Andrea Dal Prete Location: Politecnico di Milano (Bovisa Campus) Motivation of the study: Monitoring muscle activation and fatigue is crucial for optimizing physical performance and preventing work-related musculoskeletal disorders, particularly in industrial environments where back-support exoskeletons are increasingly used. While Surface Electromyography (SEMG) is the traditional gold standard, it suffers from limitations such as sensitivity to electromagnetic interference, sweat artifacts, and the need for direct skin contact, which hinders its application in real-world industrial settings. Recent research has explored thermal sensors (Thermocouples and Infrared Thermal Cameras) as non-invasive alternatives, utilizing skin temperature variations as indirect indicators of metabolic activity… Read more
-
Bipedal gait analysis on planetary surfaces
Evaluation of the mechanical cost of transport for a bipedal robot during four bipedal locomotion gaits (walking, running, jumping, and skipping), performed in simulation within three different gravitational scenarios: on Earth, Mars, and the Moon. Contacts Deutsches Zentrum für Luft- und Raumfahrt German Aerospace Center Institute of Robotics and Mechatronics Münchner Straße 20 82234 Wessling Ferdinand Elhardt Phone: +49 8153 28 3922 ferdinand.elhardt@@dlr.de Read more
-

Comparing Modern AI-Powered 3D Reconstruction Pipelines with Traditional Human Motion Capture Systems
Contacts: Marta Gandolla, Andrea Dal Prete Location: Politecnico di Milano (Bovisa Campus) Motivation of the study: Accurate human kinematics measurement is fundamental in biomechanics, ergonomics, and human–robot interaction, yet traditional approaches remain limited. Optical motion capture systems deliver high accuracy but require expensive equipment and controlled laboratory conditions, while IMU-based methods offer portability at the cost of drift and variability. These constraints motivate the search for scalable and non-intrusive alternatives. Recent advances in AI-driven pose estimation and 3D body reconstruction, such as emerging foundation models (e.g., SAM3D Body) and lightweight pipelines like MediaPipe, enable full-body mesh reconstruction directly from video, potentially providing… Read more
-
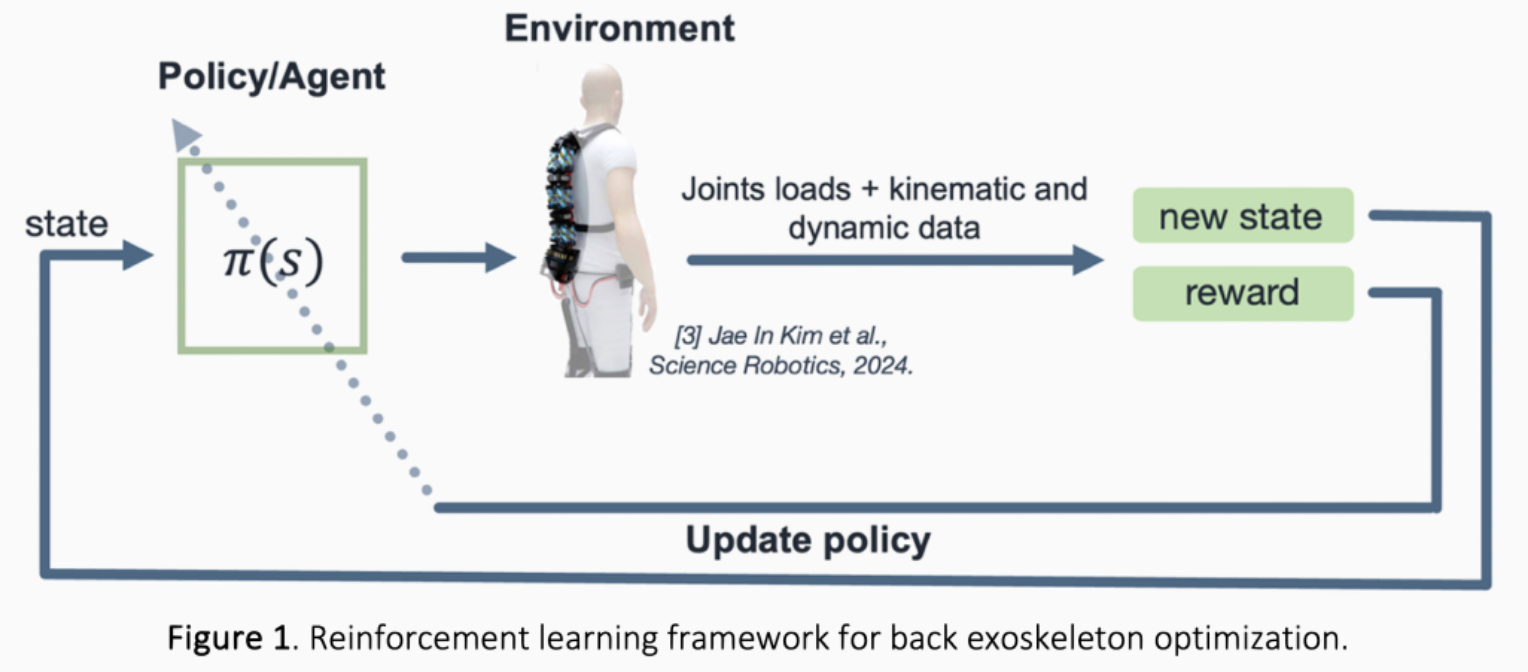
Refinement and Optimization of an Existing Reinforcement Learning Framework for Back Exoskeleton Control
Contacts: Marta Gandolla, Andrea Dal Prete Location: Politecnico di Milano (Bovisa Campus) Motivation of the study. Back exoskeletons are increasingly studied to reduce spinal loads and muscular effort in physically demanding tasks, with both rigid and soft designs showing promising results. However, widespread adoption is limited by the challenge of developing controllers that can adapt to different users and tasks. Traditional controllers ensure stability but lack flexibility, motivating the use of reinforcement learning (RL), which allows policies to be learned through interaction and has shown success in robotics and human-interactive systems. A major challenge is the computational burden of training RL agents… Read more
-
Real-Time Estimation of Arm Impedance and Variable Admittance Control for Elbow Exosuit
Contacts: Marta Gandolla, Andrea Dal Prete, Ali KhalilianMotamed Bonab Location: Politecnico di Milano (Bovisa Campus) – Scuola Sant’Anna di Pisa Motivation of the study. This thesis, developed within a collaboration between Politecnico di Milano and Scuola Superiore Sant’Anna, focuses on adaptive control strategies for a hybrid soft–rigid elbow exosuit. The project aims to estimate user biomechanical impedance from sensor data and use it to fine-tune assistance in real time, contributing to more adaptive and user-aware exosuit systems for rehabilitation and load-carrying applications. Objective. This thesis aims to develop a real-time adaptive control strategy for an elbow exosuit, adjusting admittance controller parameters based on estimated human… Read more
-
Design of a Hybrid Rigid-Soft Cable-Driven Back Exoskeleton
Contacts: Marta Gandolla, Andrea Dal Prete, Ali KhalilianMotamed Bonab Location: Politecnico di Milano (Bovisa Campus) – Scuola Sant’Anna di Pisa Motivation of the study. Musculoskeletal disorders are a major concern in jobs involving repetitive lifting, as they increase spinal loading, fatigue, and the risk of back injuries. Back support exoskeletons (BEs) aim to reduce these risks by lowering spinal loads and muscular effort. Soft designs provide comfort and mobility but limited force, while rigid ones offer stronger support but reduce user acceptance. Recent advances point to hybrid solutions, combining the flexibility of soft systems with the strength of rigid frameworks, making… Read more
-
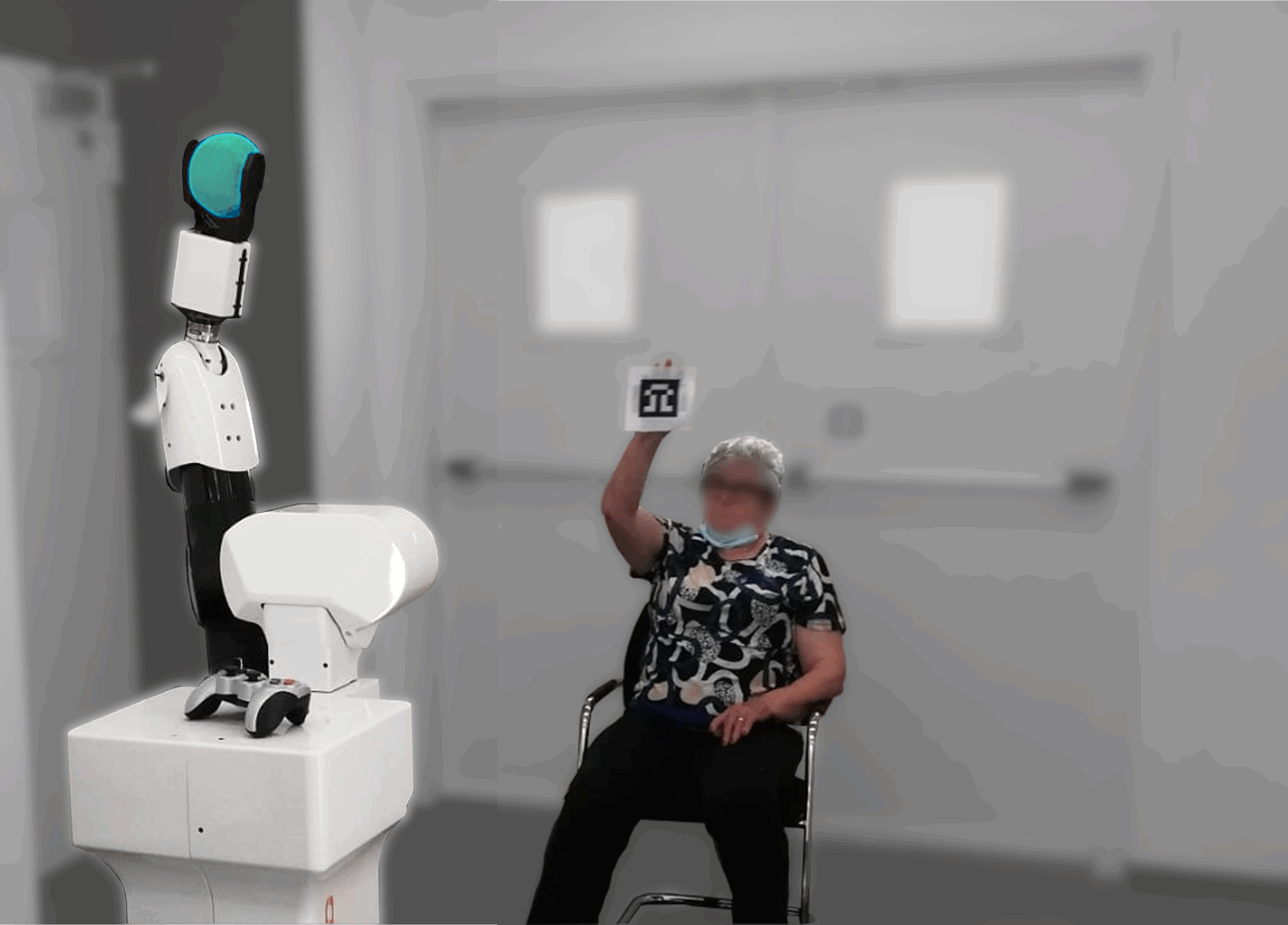
Enhancing Human-Robot Interaction in motor-cognitive game for older adults
As the aging population continues to grow, service robots are emerging as valuable tools to promote active and healthy aging. Previous work at the WE-COBOT Lab developed a motor-cognitive game for the TIAGo robot (PAL Robotics), combining physical and memory training through embodied interaction [Pozzi, Gandolla, Braghin, Robot-Mediated Gesture-Based Memory Game for Older Adult Psychophysical Stimulation. IEEE IROS 2025]. In the game, the robot mimes letters with its arm, and the user must recognize and imitate them, promoting motor and mental engagement. Pilot tests with older adults confirmed the potential of this approach but also revealed practical limitations in gesture tracking… Read more
-
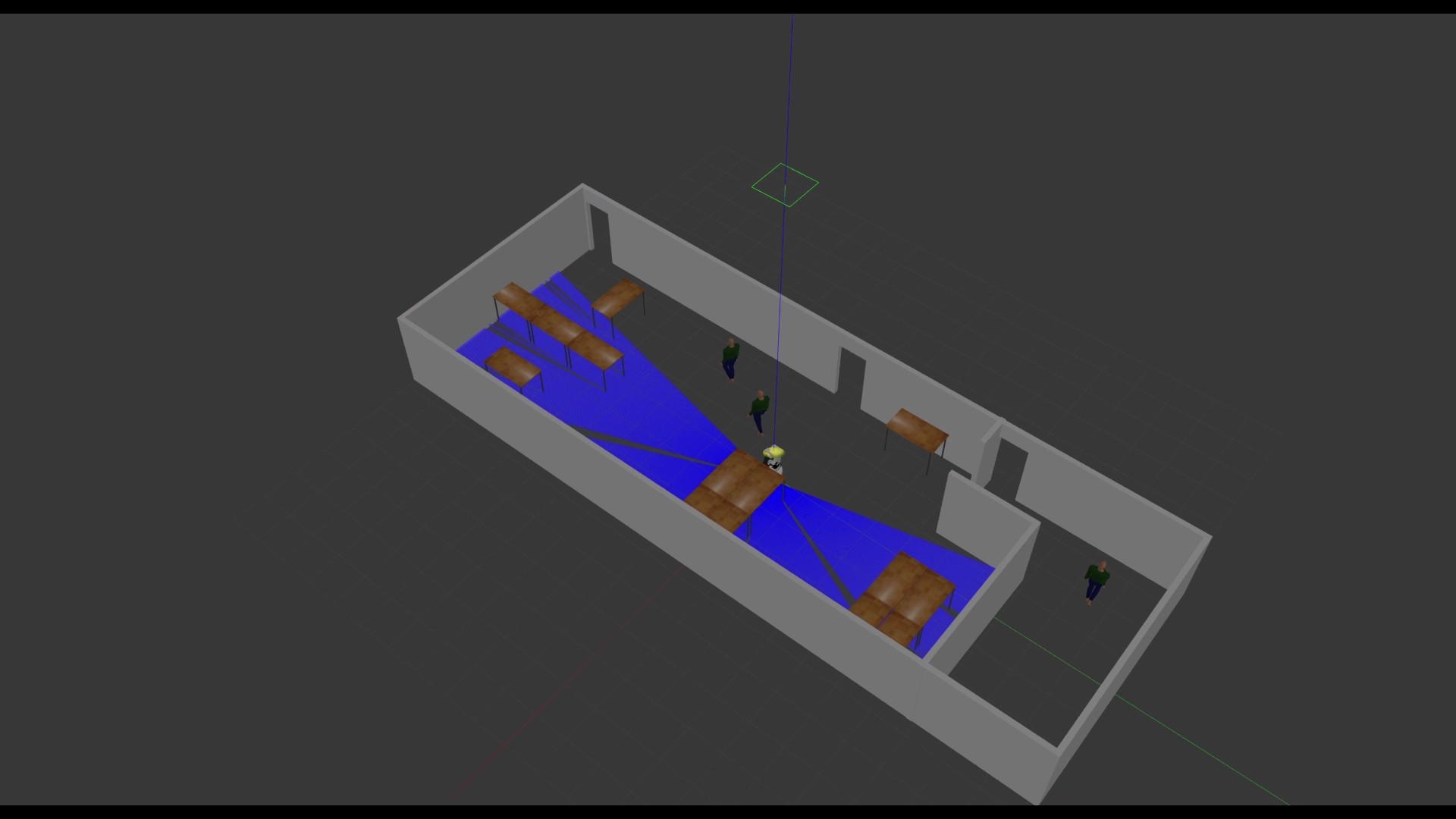
A robotic walking assistant for older adults in long-term care
Assistance and monitoring during elders’ daily walk is something that stakeholders expect from an assistive robot. Though cart-like walkers represent a possible solution, they are limited in versatility. Contrarily, a humanoid walking assistant has the potentiality to accomplish many other tasks and to engage in social interactions, extending the caregivers’ activity. The student will develop and validate sensor-based solutions for robust line-following navigation and user tracking in a (partially) known, dynamic environment. Working with the TIAGo robot (PAL Robotics), the candidate will identify and integrate sensors (e.g., RGB/RGB-D cameras, IR sensor arrays, event cameras…) to enable the robot to move… Read more
-
Physics-informed smoothing and model identification in dynamical systems
Motivation of the study. Many real-world phenomena produce time series representing the evolution of physical states, examples include the measurement of neuronal activity in neuroscience, the tracking of mechanical systems in engineering, and the monitoring of ecological processes. However, these data are often noisy, incomplete, or measured at different sample rates, making it challenging to reconstruct the true underlying signals. Standard smoothing can help, but neglecting known physics may lead to inaccurate results, especially with poor or sparse data. In contrast, physics-informed methods embed mechanistic insights into the smoothing framework, leveraging prior knowledge to guide state reconstruction. Beyond state trajectories reconstruction, model identification –… Read more