-
AI-Assisted Quantum Error Correction for Space-Based Quantum Systems
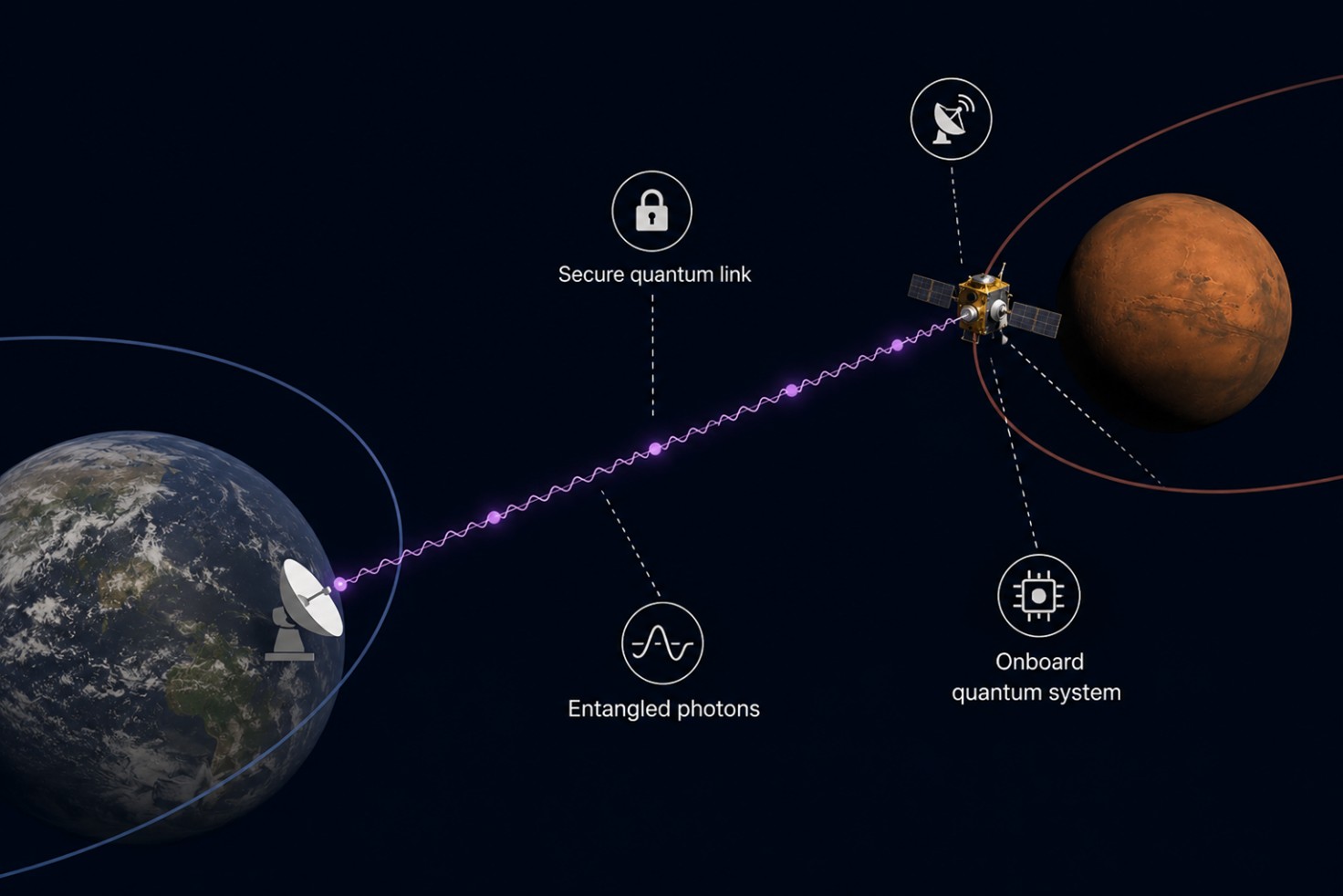
Quantum technologies are expected to play a central role in future space infrastructures, enabling ultra-secure communications, distributed sensing, autonomous navigation, and next-generation onboard computing. One of the main challenges preventing the deployment of practical quantum systems is their extreme sensitivity to noise, decoherence, radiation effects, and hardware imperfections. Quantum Error Correction (QEC) is therefore a key enabling technology for reliable quantum operations in harsh and uncertain environments such as deep space. This thesis focuses on the modelling and autonomous correction of quantum errors using AI-enhanced decoding strategies inspired by ongoing activities at NASA JPL in robust neural-network-based quantum decoders. The… Read more
-

Autonomous Operations for Venus Aerobot
Venus is emerging as one of the most compelling targets for planetary exploration. Unlike traditional landers, future concepts envision long-duration aerial robotic platforms (“aerobots”) capable of navigating the Venusian atmosphere for weeks or even months, operating in cloud layers where temperature and pressure are Earth-like. Recent JPL developments include variable-altitude aerobots able to actively control buoyancy and autonomously explore the Venus atmosphere while performing atmospheric, geological, and potentially astrobiological investigations. This thesis will focus on mission planning, autonomous navigation, and operational optimization for future Venus aerobot missions. The student will investigate trajectory design, atmospheric navigation, altitude-control strategies, science-operation scheduling, and… Read more
-
Astrodynamics and Planetary Robotics for Autonomous Space Exploration
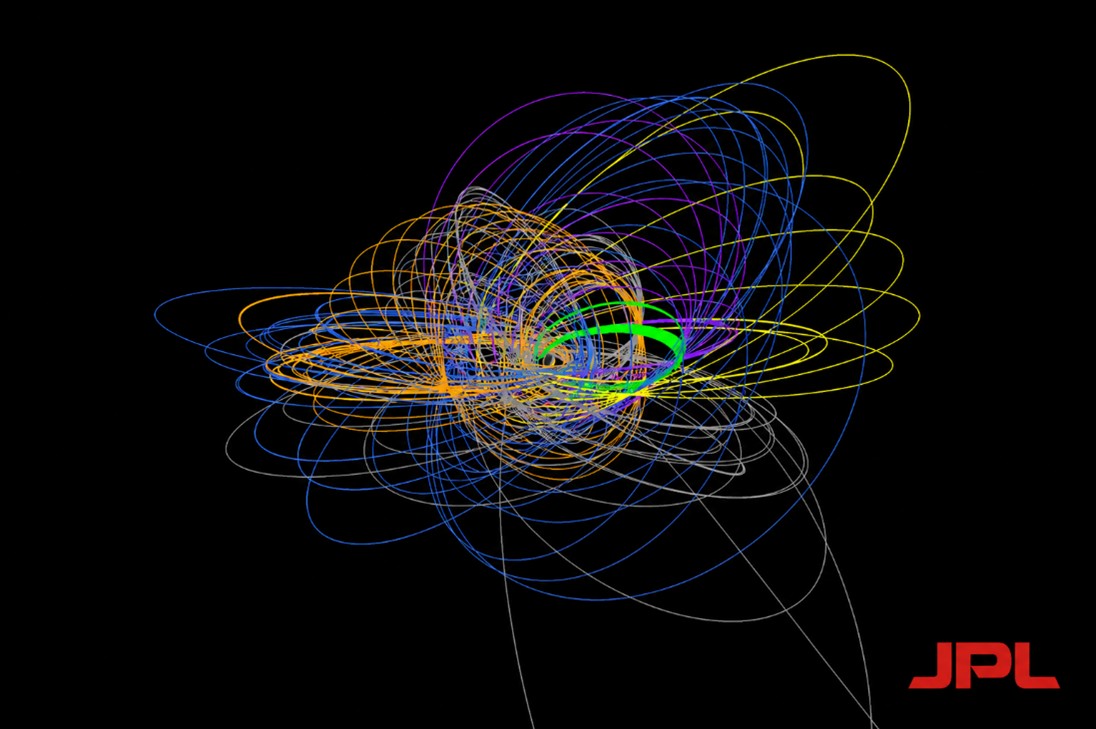
Future planetary missions will increasingly depend on highly autonomous robotic systems capable of navigating, exploring, and making decisions with minimal human supervision. This thesis focuses on advanced astrodynamics and planetary robotics technologies inspired by ongoing developments at NASA Jet Propulsion Laboratory (JPL). The student will investigate trajectory planning, autonomous navigation, terrain-aware guidance, and robotic decision-making for future planetary missions. Possible topics include autonomous rover mobility, orbital-to-surface mission planning, AI-assisted navigation, localization under uncertain terrain conditions, cooperative robotic exploration, or guidance and control for planetary landing and proximity operations. Particular emphasis will be placed on robustness under communication delays, uncertain gravity… Read more
-

Advanced Wavefront Sensing and Control for Segmented Space Telescopes
This thesis will focus on the development and validation of advanced wavefront sensing and control strategies for future segmented aperture space telescopes. The work will build on the JPL IRIS testbed, a 1-meter segmented telescope platform equipped with laser metrology, rigid-body actuators, a deformable mirror, and phase-retrieval cameras. The student will investigate how real-time control algorithms can maintain optical alignment and reject broadband disturbances affecting segmented telescope optics. A key objective will be to combine laser-metrology-based pose estimation with image-based phase retrieval to improve wavefront stability. The thesis may include modelling, calibration, control design, disturbance rejection analysis, and validation against… Read more
-
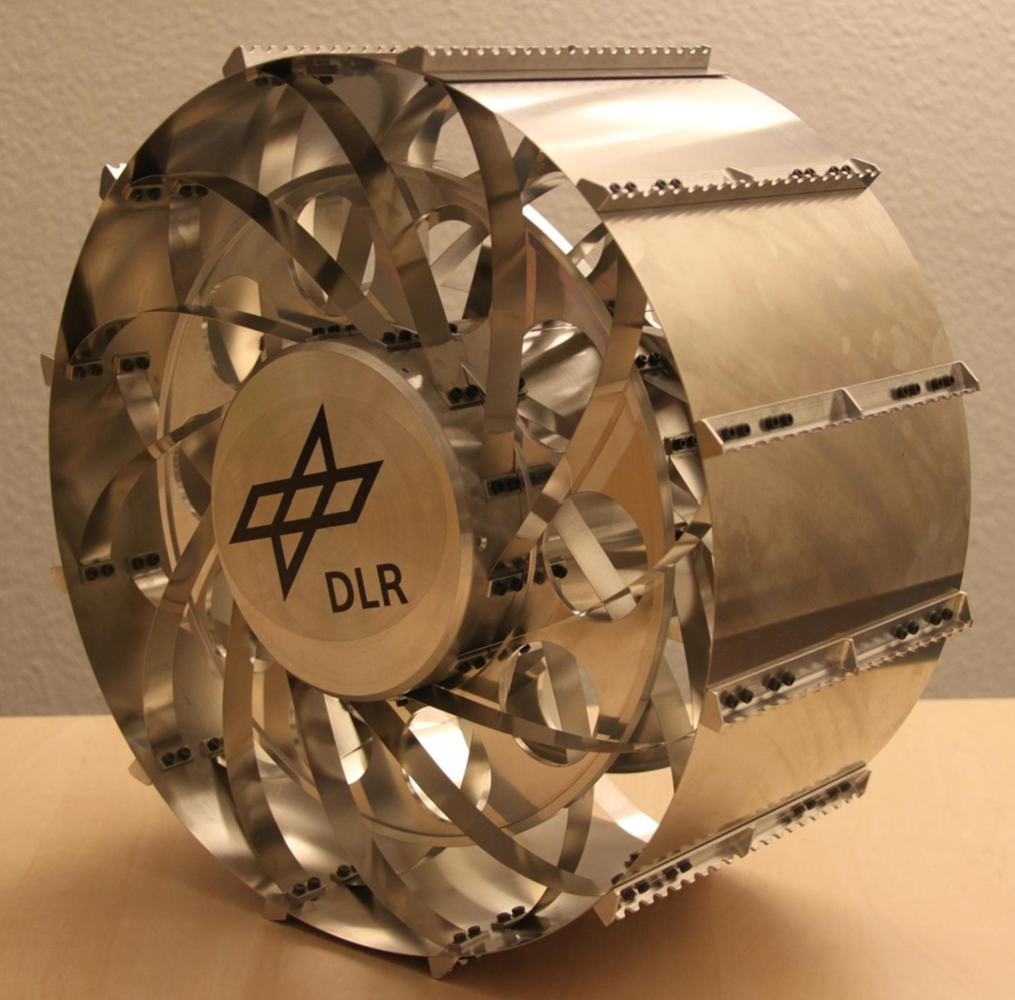
Active spoke wheel
Develop and simulate an active spoke wheel design that is able to climb stairs and navigate smooth terrains with a high energy efficiency. Inspired on the concept of actuated spokes as proposed in hybrid locomotion platforms such as IMPASS (IMPASS: Intelligent Mobility Platform with Active Spoke System | IEEE Conference Publication | IEEE Xplore) Contacts Deutsches Zentrum für Luft- und Raumfahrt German Aerospace Center Institute of Robotics and Mechatronics Münchner Straße 20 82234 Wessling Ferdinand Elhardt Phone: +49 8153 28 3922 ferdinand.elhardt@@dlr.de Read more
-
Conceptualization of a Reduced-Complex Cable-Based Gravity Compensation System for Space Manipulator On-Ground Tests
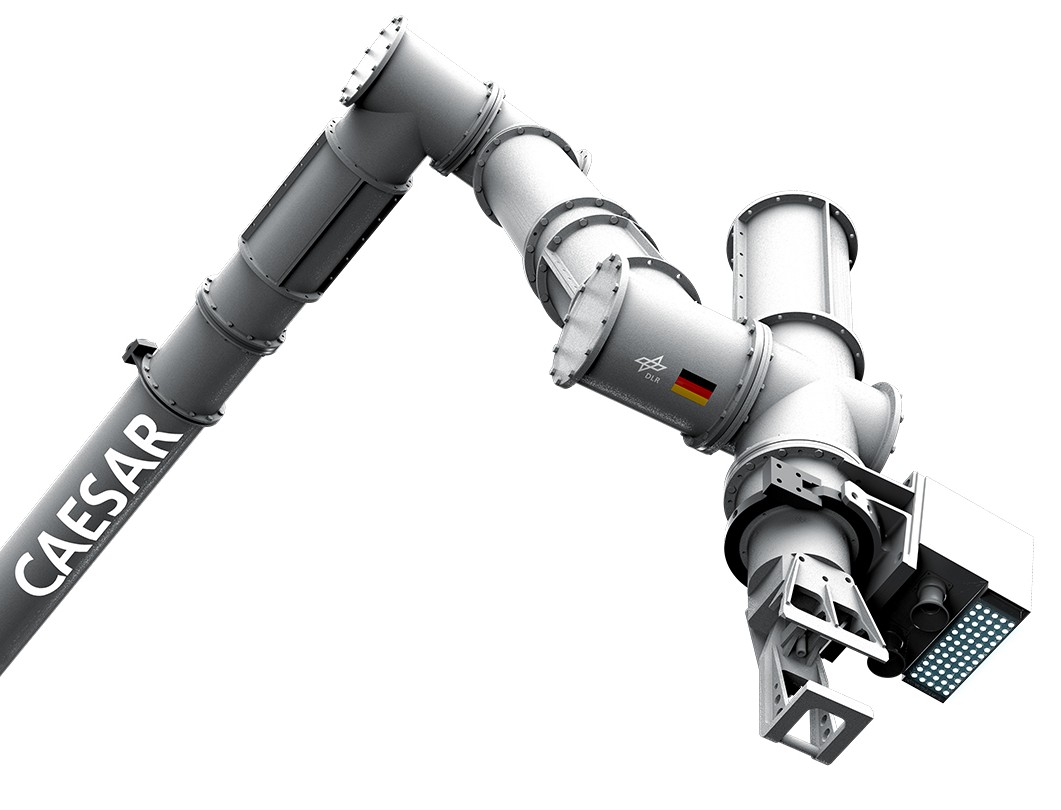
Robotics is primed to play a crucial role in future space missions. By performing tasks such as on-orbit servicing, inspection and de-orbiting, space robotics can enable a sustainable use of Earth’s orbits. The DLR’s Compliant Assistance andExploration SpAce Robot (CAESAR) is a light-weight, dexterous robot with seven degrees of freedom designed for on-orbit servicing in the Geostationary Earth Orbit (GEO). As CAESAR is designed for microgravity, it requires external gravity compensation to operate on-ground within joint torque limits. The CAESAR laboratory at Oberpfaffenhofen (Munich, Germany) uses a cable-driven parallel robot, the Motion Suspension System, to test and validate CAESAR. The… Read more
-
On-Ground Dynamics Parameter Identification and Force Distribution Analysis of a Gravity-Compensated Space Manipulator Robot
Robotics is primed to play a crucial role in future space missions. By performing tasks such as on-orbit servicing, inspection and de-orbiting, space robotics can enable a sustainable use of Earth’s orbits. The DLR’s Compliant Assistance and Exploration SpAce Robot (CAESAR) is a light-weight, dexterous robot with seven degrees of freedom designed for on-orbit servicing in the Geostationary Earth Orbit (GEO). As CAESAR is designed for microgravity, it requires external gravity compensation to operate on-ground within joint torque limits. The CAESAR laboratory at Oberpfaffenhofen (Munich, Germany) uses a cable-driven parallel robot, the Motion Suspension System, to test and validate CAESAR.… Read more