Category: Space
-
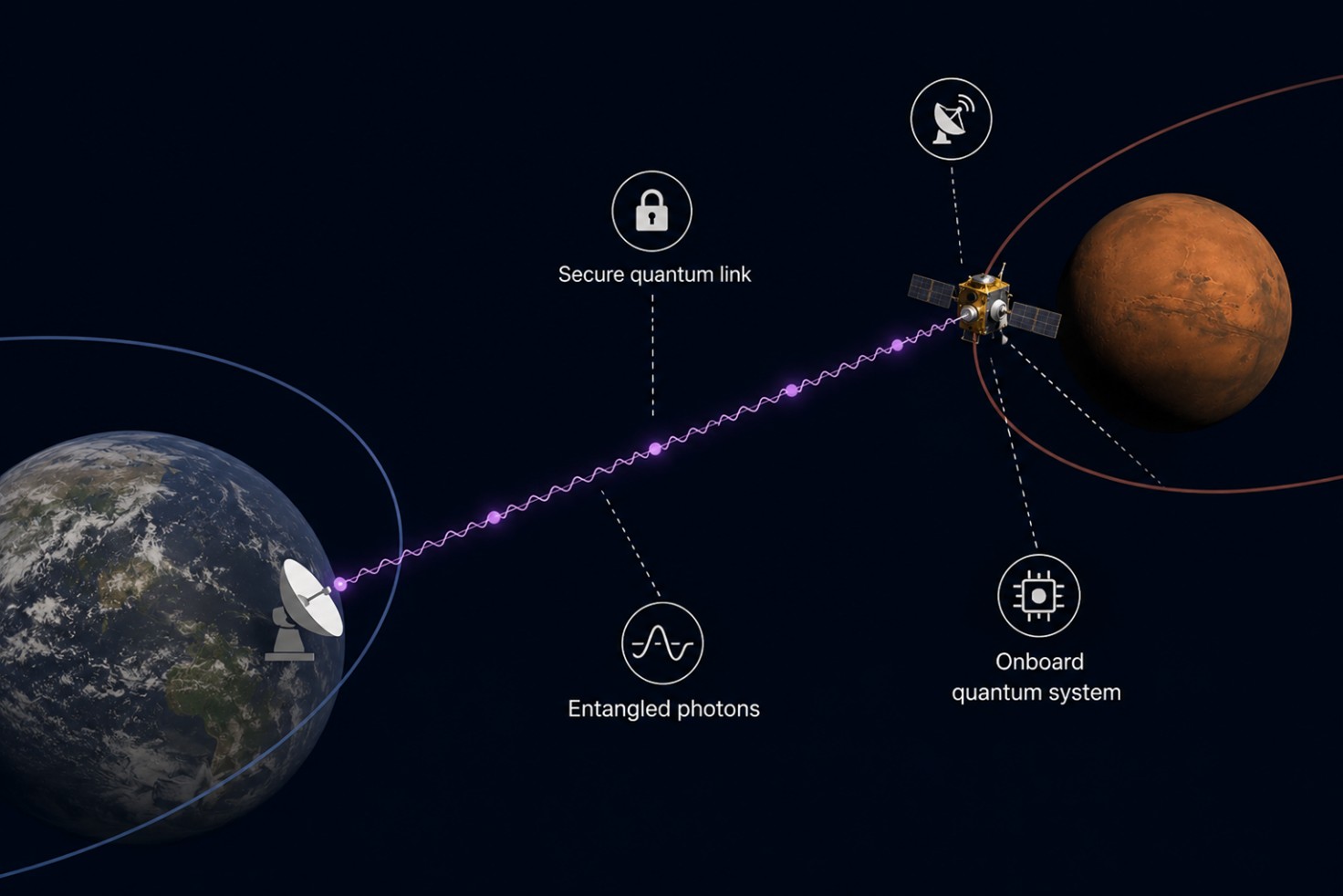
AI-Assisted Quantum Error Correction for Space-Based Quantum Systems
Quantum technologies are expected to play a central role in future space infrastructures, enabling ultra-secure communications, distributed sensing, autonomous navigation, and next-generation onboard computing. One of the main challenges preventing the deployment of practical quantum systems is their extreme sensitivity to noise, decoherence, radiation effects, and hardware imperfections. Quantum Error Correction (QEC) is therefore a…
-

Autonomous Operations for Venus Aerobot
Venus is emerging as one of the most compelling targets for planetary exploration. Unlike traditional landers, future concepts envision long-duration aerial robotic platforms (“aerobots”) capable of navigating the Venusian atmosphere for weeks or even months, operating in cloud layers where temperature and pressure are Earth-like. Recent JPL developments include variable-altitude aerobots able to actively control…
-
Astrodynamics and Planetary Robotics for Autonomous Space Exploration
Future planetary missions will increasingly depend on highly autonomous robotic systems capable of navigating, exploring, and making decisions with minimal human supervision. This thesis focuses on advanced astrodynamics and planetary robotics technologies inspired by ongoing developments at NASA Jet Propulsion Laboratory (JPL). The student will investigate trajectory planning, autonomous navigation, terrain-aware guidance, and robotic decision-making…
-

Advanced Wavefront Sensing and Control for Segmented Space Telescopes
This thesis will focus on the development and validation of advanced wavefront sensing and control strategies for future segmented aperture space telescopes. The work will build on the JPL IRIS testbed, a 1-meter segmented telescope platform equipped with laser metrology, rigid-body actuators, a deformable mirror, and phase-retrieval cameras. The student will investigate how real-time control…
-
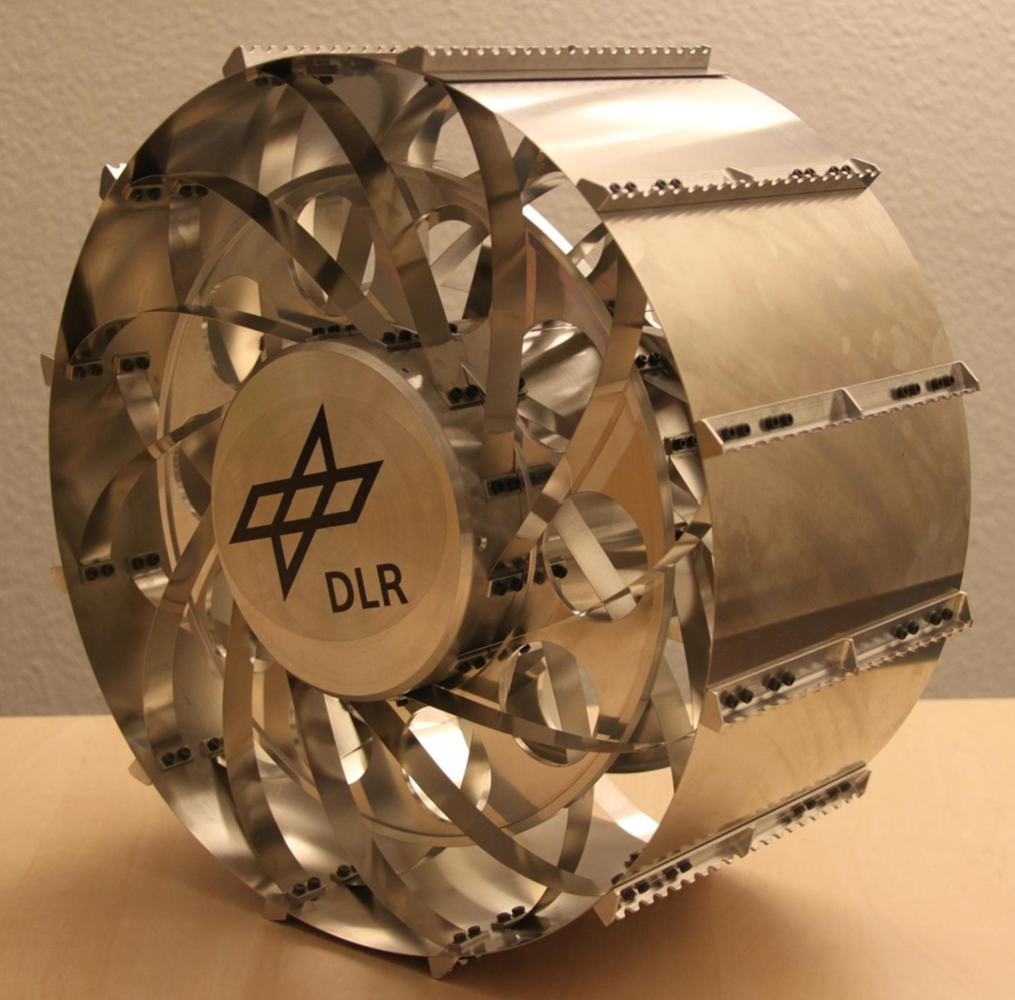
Active spoke wheel
Develop and simulate an active spoke wheel design that is able to climb stairs and navigate smooth terrains with a high energy efficiency. Inspired on the concept of actuated spokes as proposed in hybrid locomotion platforms such as IMPASS (IMPASS: Intelligent Mobility Platform with Active Spoke System | IEEE Conference Publication | IEEE Xplore) Contacts…
-
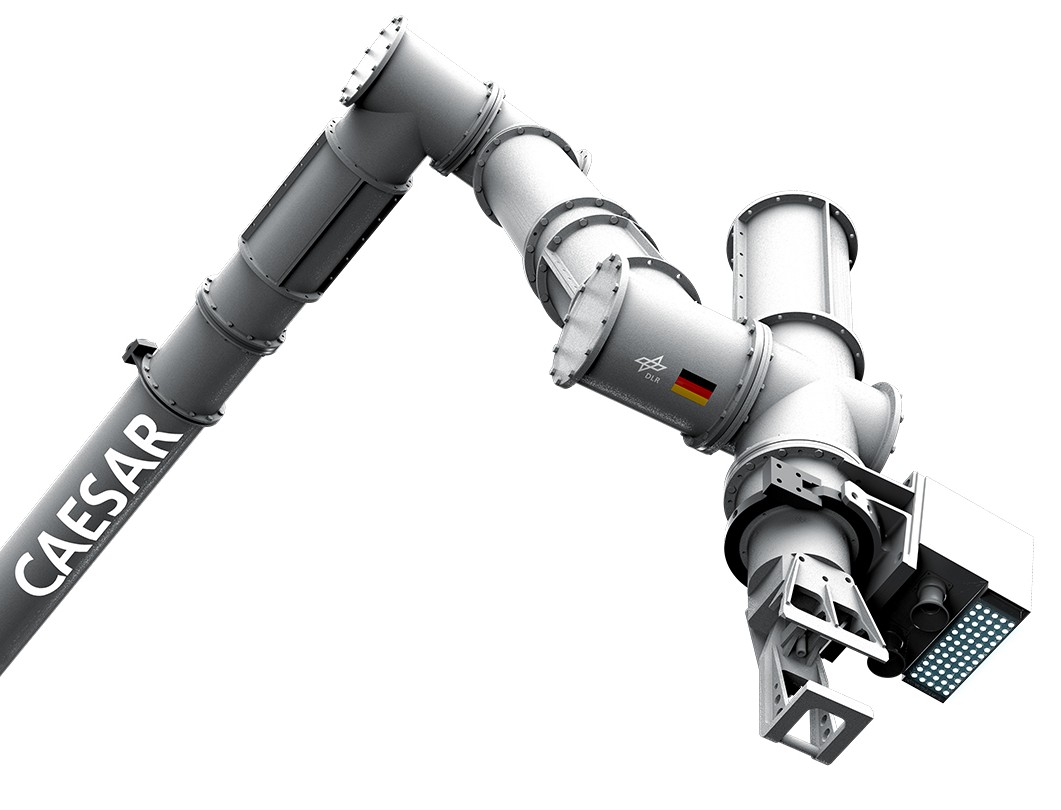
Conceptualization of a Reduced-Complex Cable-Based Gravity Compensation System for Space Manipulator On-Ground Tests
Robotics is primed to play a crucial role in future space missions. By performing tasks such as on-orbit servicing, inspection and de-orbiting, space robotics can enable a sustainable use of Earth’s orbits. The DLR’s Compliant Assistance andExploration SpAce Robot (CAESAR) is a light-weight, dexterous robot with seven degrees of freedom designed for on-orbit servicing in…
-
On-Ground Dynamics Parameter Identification and Force Distribution Analysis of a Gravity-Compensated Space Manipulator Robot
Robotics is primed to play a crucial role in future space missions. By performing tasks such as on-orbit servicing, inspection and de-orbiting, space robotics can enable a sustainable use of Earth’s orbits. The DLR’s Compliant Assistance and Exploration SpAce Robot (CAESAR) is a light-weight, dexterous robot with seven degrees of freedom designed for on-orbit servicing…