-
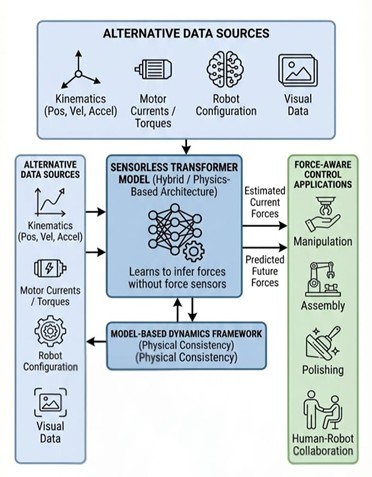
Sensorless Transformer for Interaction Force Prediction and Estimation
While recent work has shown that generative AI models, like transformers, can be used to predict future interaction forces, given past recorded data, including recorded forces, many platforms lack force sensors or cannot reliably record past forces. To bridge this gap, this thesis aims to augment a transformer model so it can estimate current interaction forces and forecast future forces without relying on historical force measurements. The core idea is to identify and integrate alternative data sources – such as kinematic signals (e.g., Cartesian position, velocity, acceleration), motor currents or torques, robot configuration, and possibly visual data – into a… Read more
-
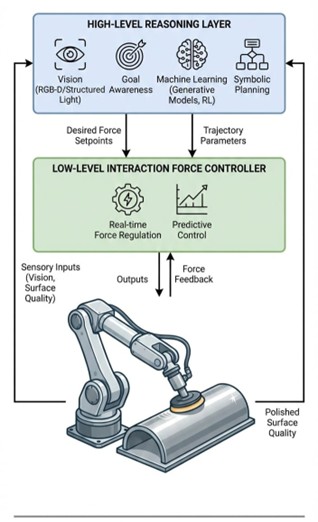
High level reasoning layer for a learning-based interaction force controller for autonomous polishing
This thesis proposes to equip an existing low-level predictive interaction force controller – developed for compliant tasks- with a high-level reasoning layer that autonomously manages polishing operations. While the force controller reliably regulates contact forces and nominal trajectories in real time, it lacks environmental context and goal awareness. The research goal is to design and implement a reasoning module that processes sensory inputs, for example, vision-based (RGB-D or structured light vision of the workpiece, surface quality metrics, and task specifications) to dynamically generate, and maybe adjust, the desired force setpoints and trajectory parameters for the lower-level controller. Key objectives include:… Read more
-
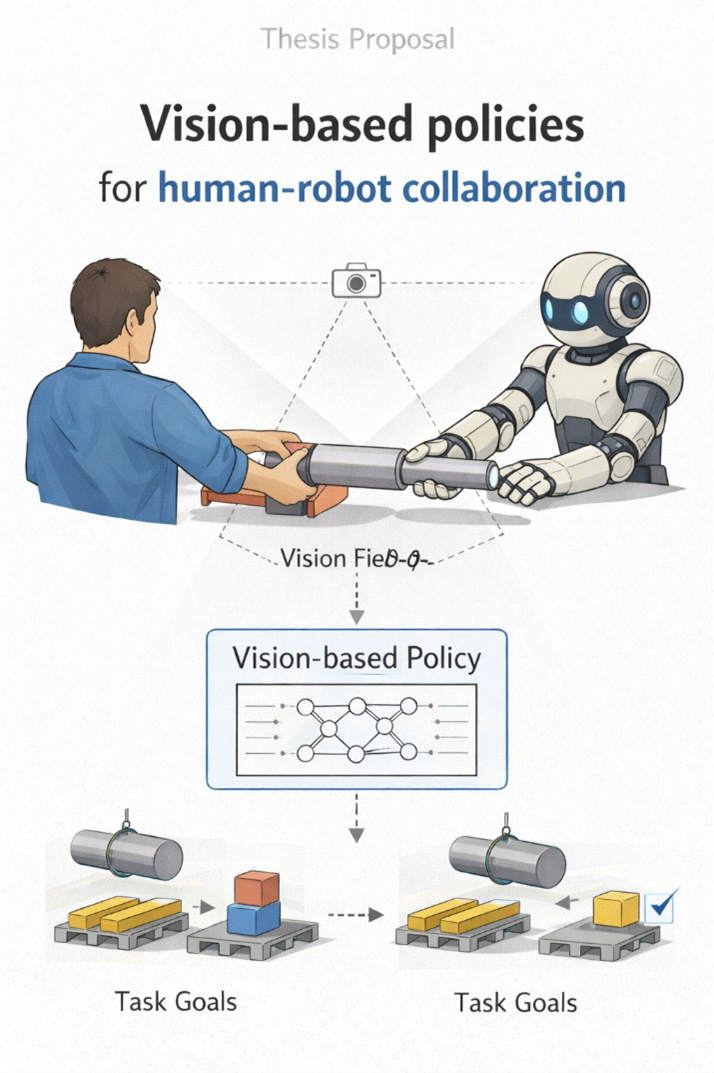
Vision-based policies for human-robot collaboration
This thesis investigates vision-based policies (e.g., VLAs, diffusion policy, flow matching) for human-robot collaboration. Despite standard collaborative controllers which make only use of the robot and (if available) human states, vision-based policies are trained additionally on images captured during the task execution. This provides the robot with the possibility to embed the perception of the environment directly into its controller. However, such policies are strongly dependent on the training dataset (e.g., background) and are commonly only available for autonomous static tasks. In this thesis, we would like to extend vision-based policies to dynamic environments and, in particular, to human-robot collaboration.… Read more
-
Beach Cleaner Project from BCC
The Beach Cleaner Project focuses on developing a lightweight, practical, and affordable tool designed to clean beaches efficiently from plastics, general debris and natural material, without compromising the natural environment. The aim is to create a user-friendly solution that allows anyone to maintain coastal areas and beachfront properties, such as hotels and beach clubs in a clean, guest-ready condition without relying on heavy machinery or high operational costs. This initiative brings innovation, environmental care, and functional design. The project explores material selection, power systems, structural engineering, weight distribution, and ergonomics to build a tool that is simple to operate yet highly… Read more
-

Development of a training simulator for industrial applications
Immersive simulation systems can be used as training systems but also as systems for monitoring user behaviour. Through behaviour mapping, it is possible to develop safety logic and algorithms with which production systems can be improved. In this thesis, a multidirectional treadmill is used to recreate a demo of a work situation suitable for both training and user behaviour mapping. A collaborative (human-robot) industrial production task will be reproduced to simulate a real condition. Haptic interfaces, vision system, headset and software development will be the ingredients of this thesis. Contacts: Hermes Giberti Read more