General Introduction (reading is strongly advised!)
-
Optimization and Parallelization of Ray-tracing code for microwave propagation in Tokamak plasmas
Background and motivationElectron Cyclotron Resonance Heating (ECRH) systems inject high-power millimeter waves into magnetically confined plasmas to provide localized heating and, when needed, current drive. In tokamaks, the effectiveness and safety of ECRH depend strongly on how the beam propagates through an inhomogeneous, magnetized medium: refraction, mode evolution, and absorption determine the deposited power profile, while incomplete absorption can lead to reflected power and stray radiation that may stress plasma-facing components and diagnostic hardware. Reliable, fast beam-tracing simulations are therefore essential both for scenario design (choice of launcher angles, frequencies, polarization, and aiming) and for operational studies that require large… Read more
-
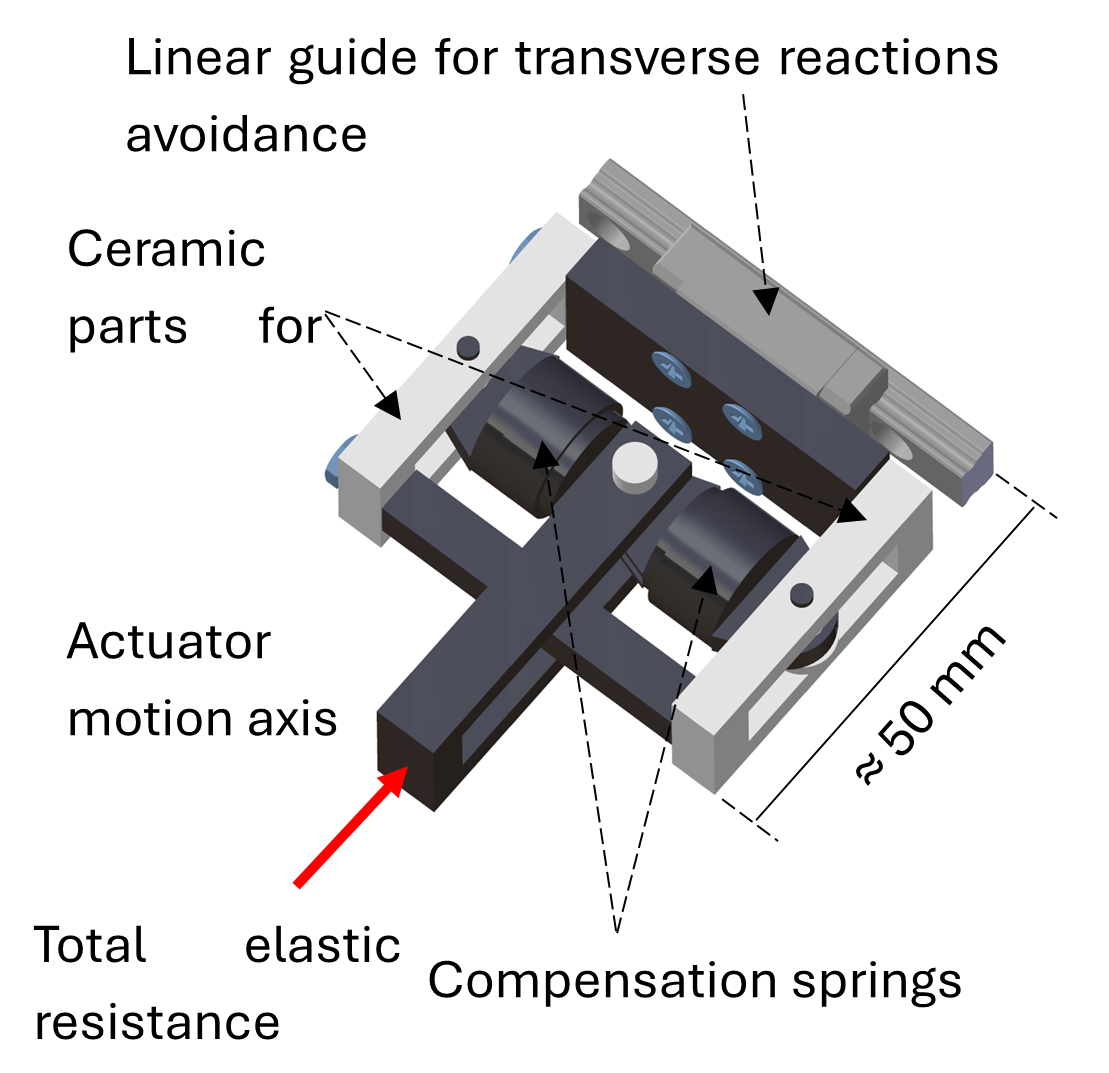
Development of a statically balanced Remote Centre of Motion flexure pivot
General Introduction on nuclear fusion (reading is strongly advised!) Flexure pivots are monolithic devices that can undergo large rotations about one axis, while being very stiff with respect to all other degrees of freedom. Remote Centre of Motion flexure pivots, like the one shown in Figure 3, allow rotations about a virtual axis that is external to the volume occupied by the pivot itself. This is particularly useful in the case of ECRH launchers, because it allows to hide the pivot behind the steering mirror, thus protecting it from the microwave beam, while maintaining the rotation axis of the mirror… Read more
-

Looking through the wall. Virtual reality for remote handing of radioactive samples in hot cells
This thesis explores an innovative solution to improve visual feedback during operations in hot cells, shielded environments used for handling radioactive materials. Due to the high levels of radiation, all operations inside these enclosures must be performed remotely, typically through mechanical manipulators based on a “mirroring” principle, where the operator’s movements outside the cell are replicated by an internal arm. Currently, operators control these systems by physically handling the external part of the manipulator while looking through approximately one meter of leaded glass. This setup significantly limits the field of view and introduces optical distortions, making precise operations difficult. The… Read more