-
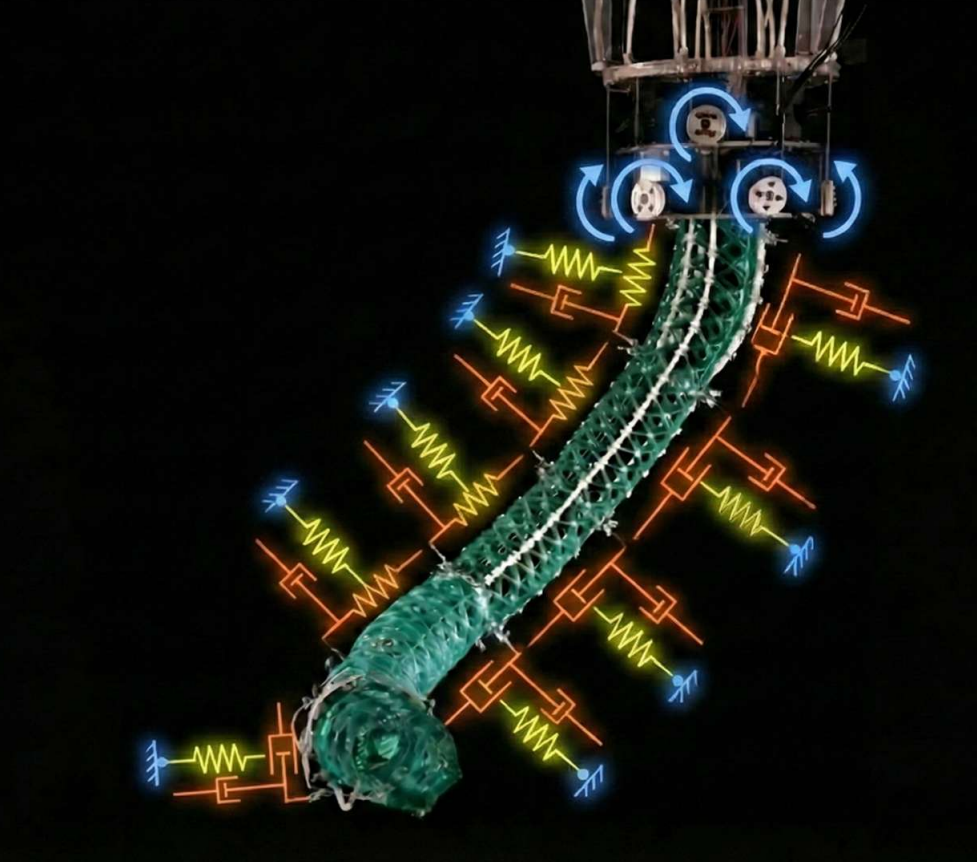
Virtual Model Control of a Soft Compliant Manipulator
Soft continuum robotic arms offer unparalleled dexterity and compliance over rigid bodies, thus facilitating safe and robust interactions with environments. These characteristics make them ideal for diverse applications, such as collaborative robotics or medical contexts. However, due to their virtually infinite degrees of freedom, control of these systems has always been a challenge. Various control strategies have emerged, ranging from kinematic controllers to data-driven methods. However, most approaches disregard the inherent compliance of the robot. They impose artificial rigidity on the system, eventually negating the structural flexibility that constitutes its primary advantage. As the main intelligence of the robot is… Read more
-

Control of an aquatic snake robot inspired by lampreys’ Central Pattern Generator
Aquatic robots inspired by snakes or eels can move with extreme agility and maneuverability, and are able to swim through narrow spaces and confined environments, opening the possibility to use these robots for environmental monitoring, search and rescue or infrastructure inspection. This robot is composed of nine modules that move generating a wave traveling from the head to the tail, which pushes water backwards, propelling the snake robot. The objective of this thesis is to design a control algorithm to generate the movement based on Central Pattern Generator (CPG), which is a neuronal circuit able to generate rythmic outputs. This… Read more
-

Real-time optimal transport of robotic swarms in fluids in 3D domains
Optimally guiding large-scale swarms of drones, underwater vehicles or nanoparticles moving in a fluid is a crucial task in several fields, ranging from medicine to smart delivery. To steer the swarm dynamics avoiding obstacles, controllers must be able to rapidly adapt the optimal action to changes in the external environment, as often happen in applications. High-fidelity solvers for PDE-constrained optimization problems based on, e.g., Finite Element Method (FEM), do not meet these requirements due to the computational burden entailed. This thesis aims to employ non-intrusive nonlinear reduced order models based on deep learning to optimally and rapidly drive swarms moving… Read more
-
Design and testing of an SMA-actuated fin for bioinspired soft robots
The thesis consists of designing a fin inspired by the cownose ray, entirely made of silicone rubber, without any rigid mechanism inside, and actuated by SMA (Shape Memory Alloy) coils. The lack of rigid elements inside the fin helps reproduce better the natural movement of these fishes, and arranging the coils in pairs, they work as antagonistic muscles. The work includes optimizing the SMA actuator arrangement inside the fin, defining the activation sequence to obtain the desired movement, measuring the forces generated for different configurations, performing experimental tests on the fin, and build the robot. The experiments will be conducted… Read more
-
Study of the propulsive performance of fins
The most common propulsive strategy of fishes and cetaceans is the Body-Caudal fin movement in which the animal undulates or oscillates its body, pushing backward the surrounding water. Most of the thrust is generated by the movement of the caudal fin, and every fish has a peculiar fin shape with a particular motion law, which determines different swimming performances. This thesis aims to understand the advantages and disadvantages of different fins both numerically, using CFD simulations, and experimentally, using a dedicated test bench. The experiments will be conducted at the Bioinspired Robotics Lab @ PoliMi Lecco. Read more