Author: Loris Roveda
-
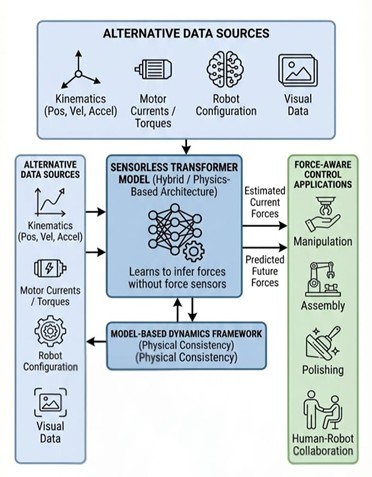
Sensorless Transformer for Interaction Force Prediction and Estimation
While recent work has shown that generative AI models, like transformers, can be used to predict future interaction forces, given past recorded data, including recorded forces, many platforms lack force sensors or cannot reliably record past forces. To bridge this gap, this thesis aims to augment a transformer model so it can estimate current interaction…
-
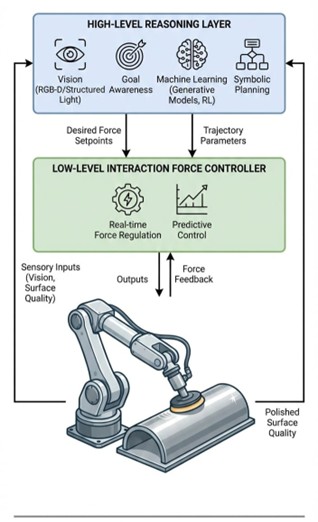
High level reasoning layer for a learning-based interaction force controller for autonomous polishing
This thesis proposes to equip an existing low-level predictive interaction force controller – developed for compliant tasks- with a high-level reasoning layer that autonomously manages polishing operations. While the force controller reliably regulates contact forces and nominal trajectories in real time, it lacks environmental context and goal awareness. The research goal is to design and…
-
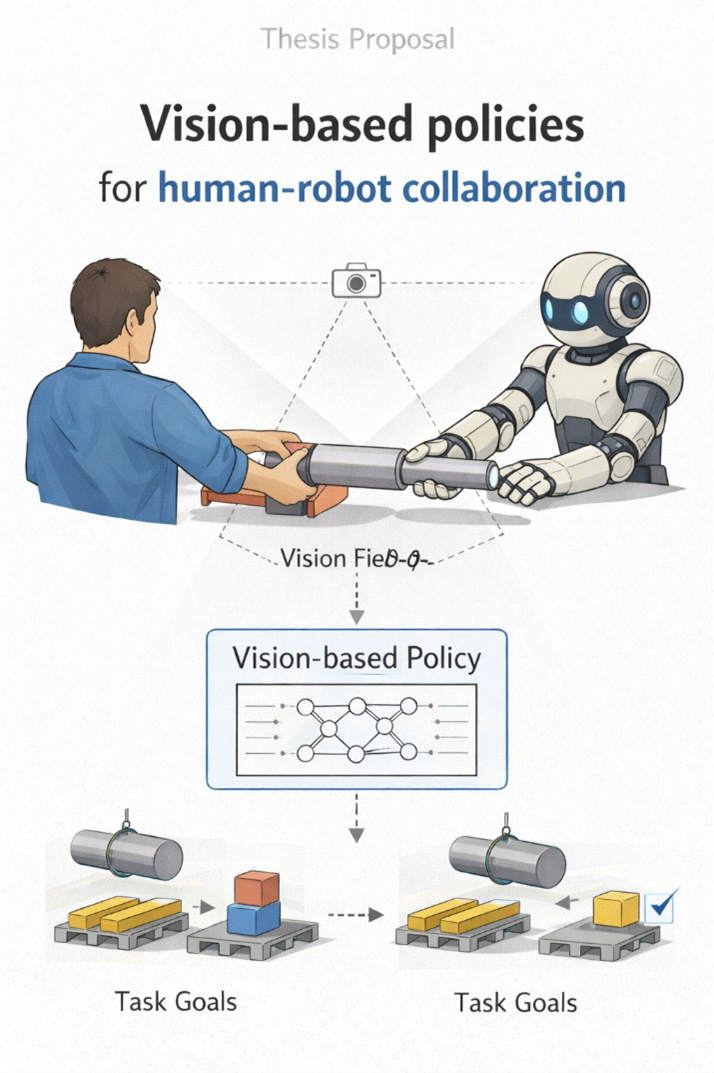
Vision-based policies for human-robot collaboration
This thesis investigates vision-based policies (e.g., VLAs, diffusion policy, flow matching) for human-robot collaboration. Despite standard collaborative controllers which make only use of the robot and (if available) human states, vision-based policies are trained additionally on images captured during the task execution. This provides the robot with the possibility to embed the perception of the…