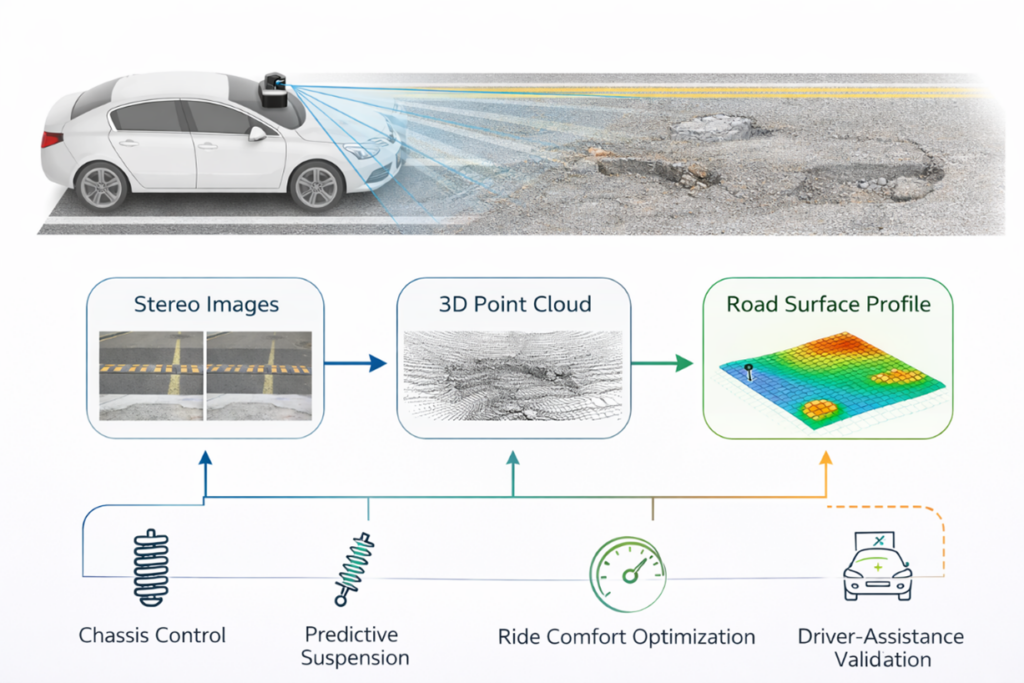
The purpose of this thesis is to design and train an algorithm capable of extracting detailed road surface profiles from 3D LiDAR point cloud data. The research will investigate advanced filtering techniques, surface reconstruction methods, and machine learning models to accurately detect road irregularities such as bumps, potholes, and uneven surfaces. The reconstructed road profile can be used to enhance chassis control systems, predictive suspension tuning, and ride comfort optimization, as well as to support advanced driver-assistance validation. The work will involve both simulation and experimental datasets, with validation under different road and environmental conditions.
The thesis will be conducted in collaboration with a car manufacturer, enabling industrial benchmarking and potential integration into existing perception stacks.