Category: Miscellanea
-
Real-Time State Estimation and Quench Prevention in Superconducting Magnets
This thesis focuses on the development of a real-time state estimation system for superconducting magnets, aimed at detecting early signs of instability and preventing quench events. The activity will investigate the use of advanced estimation techniques to reconstruct the internal electro-thermal state of a superconducting coil from available sensor measurements. The student will develop numerical…
-
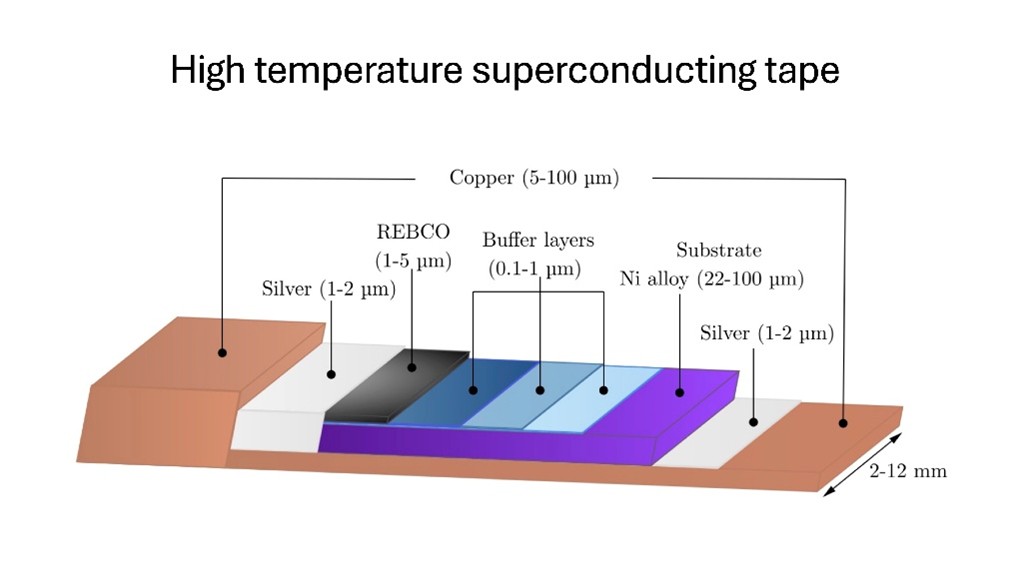
3D-Printed and Topology-Optimized Structures for Superconducting Magnets
This thesis focuses on the design, structural analysis and topology optimization of advanced components for superconducting tapes and superconducting magnets. The activity will explore how additive manufacturing can be used to create lightweight, mechanically efficient and highly customized support structures able to operate under the demanding conditions of high-field superconducting systems. The student will investigate…
-
Mechanical Design of Support Structures for High-Field Superconducting Magnets
This thesis focuses on the mechanical design and numerical assessment of support structures for next-generation high-field superconducting magnets, operating in the 14–20 T range within CERN-related accelerator magnet development. The thesis will be carried out in collaboration with INFN, providing the student with direct exposure to advanced research activities in superconducting magnet technologies. These systems…
-

Closed-Loop, Sensorless Position Control Algorithm for Directional Proportional Electrohydraulic Valves
The objective of this thesis is the development of an innovative closed-loop, sensorless position control algorithm for proportional electrohydraulic valves, based on the indirect estimation of the electromagnet inductance, in order to ensure good control accuracy and repeatability. This approach makes it possible to eliminate the use of an LVDT position transducer, resulting in a…
-

Optimal Control of Flow-Induced TRAPs Using Spinning Robots
This project combines optimal control, fluid mechanics, and dynamical systems to design and steer transport and accumulation regions (TRAPs) in fluid environments using spinning robots as flow actuators. By controlling rotation speed, direction, and robot coordination, we aim to generate tailored flow structures that selectively trap floating particles or swimming microorganisms. The theoretical component builds…
-
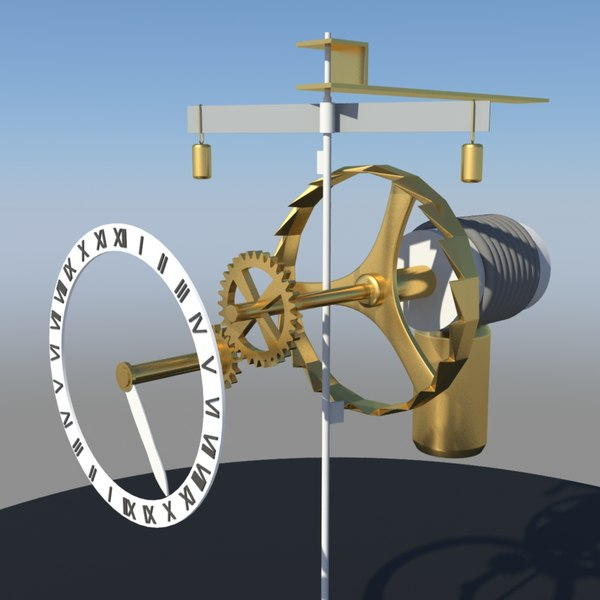
Multibody simulation of medieval mechanical clock
Background and MotivationThe verge-and-foliot escapement is among the earliest mechanical regulation mechanisms, yet its motion and timekeeping performance remain challenging to predict quantitatively because the device operates through intermittent contact between the crown wheel teeth and the pallets mounted on the verge. From an engineering standpoint, this makes the system highly sensitive to geometry, inertia…