Category: Industrial
-
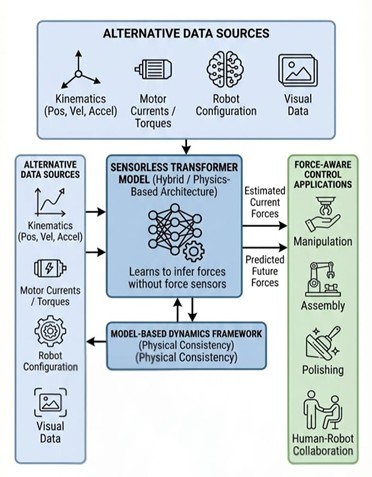
Sensorless Transformer for Interaction Force Prediction and Estimation
While recent work has shown that generative AI models, like transformers, can be used to predict future interaction forces, given past recorded data, including recorded forces, many platforms lack force sensors or cannot reliably record past forces. To bridge this gap, this thesis aims to augment a transformer model so it can estimate current interaction
-
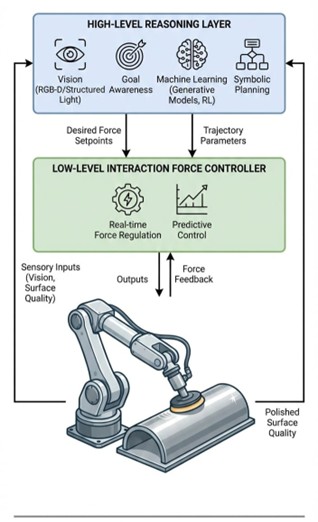
High level reasoning layer for a learning-based interaction force controller for autonomous polishing
This thesis proposes to equip an existing low-level predictive interaction force controller – developed for compliant tasks- with a high-level reasoning layer that autonomously manages polishing operations. While the force controller reliably regulates contact forces and nominal trajectories in real time, it lacks environmental context and goal awareness. The research goal is to design and
-
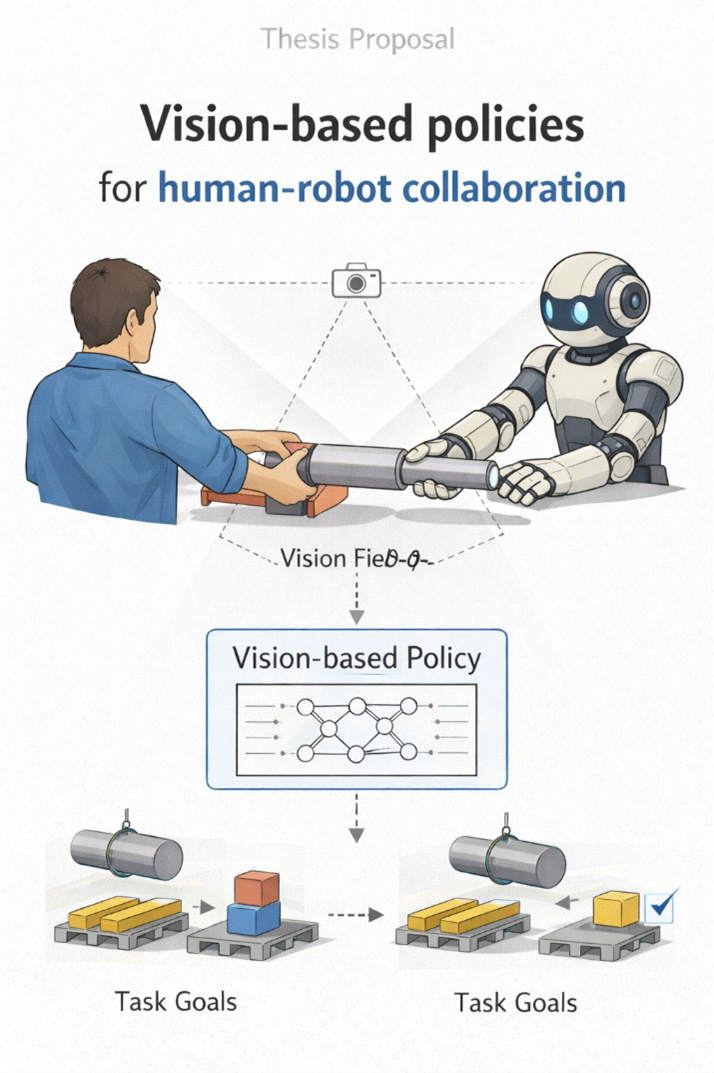
Vision-based policies for human-robot collaboration
This thesis investigates vision-based policies (e.g., VLAs, diffusion policy, flow matching) for human-robot collaboration. Despite standard collaborative controllers which make only use of the robot and (if available) human states, vision-based policies are trained additionally on images captured during the task execution. This provides the robot with the possibility to embed the perception of the
-
Active spoke wheel
Develop and simulate an active spoke wheel design that is able to climb stairs and navigate smooth terrains with a high energy efficiency. Inspired on the concept of actuated spokes as proposed in hybrid locomotion platforms such as IMPASS (IMPASS: Intelligent Mobility Platform with Active Spoke System | IEEE Conference Publication | IEEE Xplore) Contacts
-
Conceptualization of a Reduced-Complex Cable-Based Gravity Compensation System for Space Manipulator On-Ground Tests
Robotics is primed to play a crucial role in future space missions. By performing tasks such as on-orbit servicing, inspection and de-orbiting, space robotics can enable a sustainable use of Earth’s orbits. The DLR’s Compliant Assistance andExploration SpAce Robot (CAESAR) is a light-weight, dexterous robot with seven degrees of freedom designed for on-orbit servicing in
-
On-Ground Dynamics Parameter Identification and Force Distribution Analysis of a Gravity-Compensated Space Manipulator Robot
Robotics is primed to play a crucial role in future space missions. By performing tasks such as on-orbit servicing, inspection and de-orbiting, space robotics can enable a sustainable use of Earth’s orbits. The DLR’s Compliant Assistance and Exploration SpAce Robot (CAESAR) is a light-weight, dexterous robot with seven degrees of freedom designed for on-orbit servicing
-
Beach Cleaner Project from BCC
The Beach Cleaner Project focuses on developing a lightweight, practical, and affordable tool designed to clean beaches efficiently from plastics, general debris and natural material, without compromising the natural environment. The aim is to create a user-friendly solution that allows anyone to maintain coastal areas and beachfront properties, such as hotels and beach clubs in a
-

Development of a training simulator for industrial applications
Immersive simulation systems can be used as training systems but also as systems for monitoring user behaviour. Through behaviour mapping, it is possible to develop safety logic and algorithms with which production systems can be improved. In this thesis, a multidirectional treadmill is used to recreate a demo of a work situation suitable for both