Author: Francesco Braghin
-

Optimal Control of Flow-Induced TRAPs Using Spinning Robots
This project combines optimal control, fluid mechanics, and dynamical systems to design and steer transport and accumulation regions (TRAPs) in fluid environments using spinning robots as flow actuators. By controlling rotation speed, direction, and robot coordination, we aim to generate tailored flow structures that selectively trap floating particles or swimming microorganisms. The theoretical component builds
-
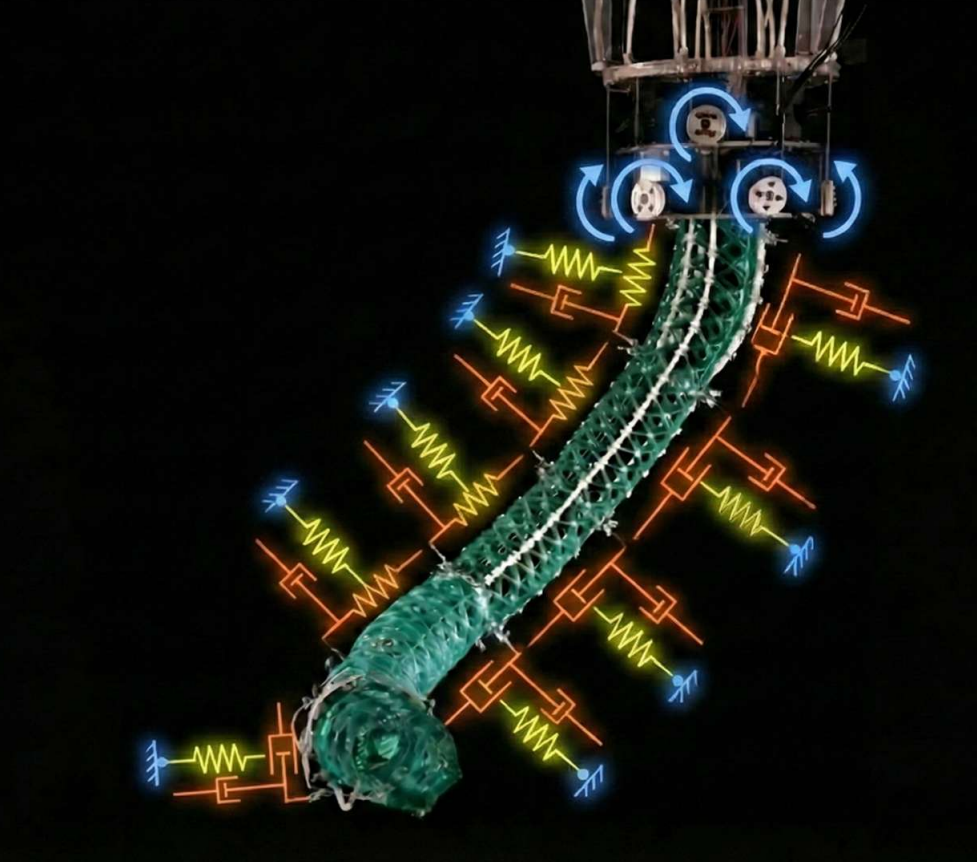
Virtual Model Control of a Soft Compliant Manipulator
Soft continuum robotic arms offer unparalleled dexterity and compliance over rigid bodies, thus facilitating safe and robust interactions with environments. These characteristics make them ideal for diverse applications, such as collaborative robotics or medical contexts. However, due to their virtually infinite degrees of freedom, control of these systems has always been a challenge. Various control
-
Bipedal gait analysis on planetary surfaces
Evaluation of the mechanical cost of transport for a bipedal robot during four bipedal locomotion gaits (walking, running, jumping, and skipping), performed in simulation within three different gravitational scenarios: on Earth, Mars, and the Moon. Contacts Deutsches Zentrum für Luft- und Raumfahrt German Aerospace Center Institute of Robotics and Mechatronics Münchner Straße 20 82234 Wessling
-
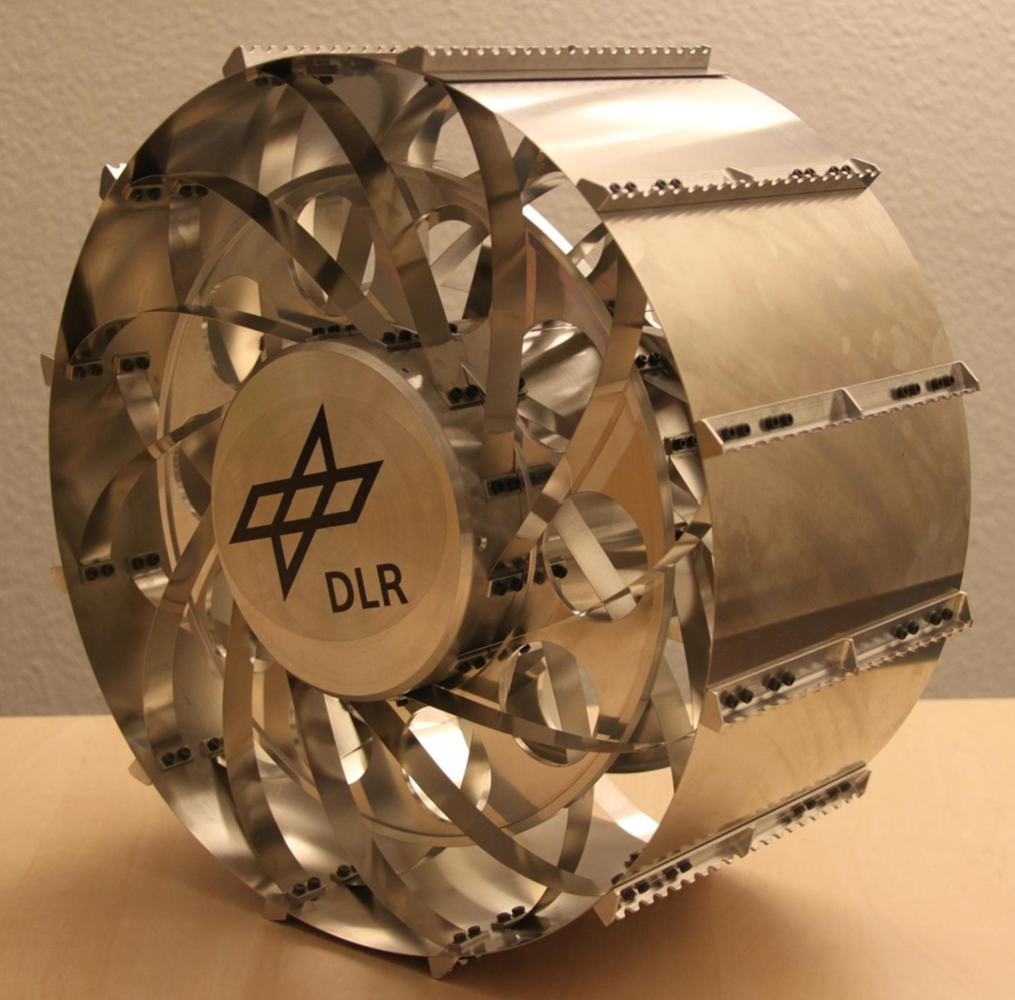
Active spoke wheel
Develop and simulate an active spoke wheel design that is able to climb stairs and navigate smooth terrains with a high energy efficiency. Inspired on the concept of actuated spokes as proposed in hybrid locomotion platforms such as IMPASS (IMPASS: Intelligent Mobility Platform with Active Spoke System | IEEE Conference Publication | IEEE Xplore) Contacts
-
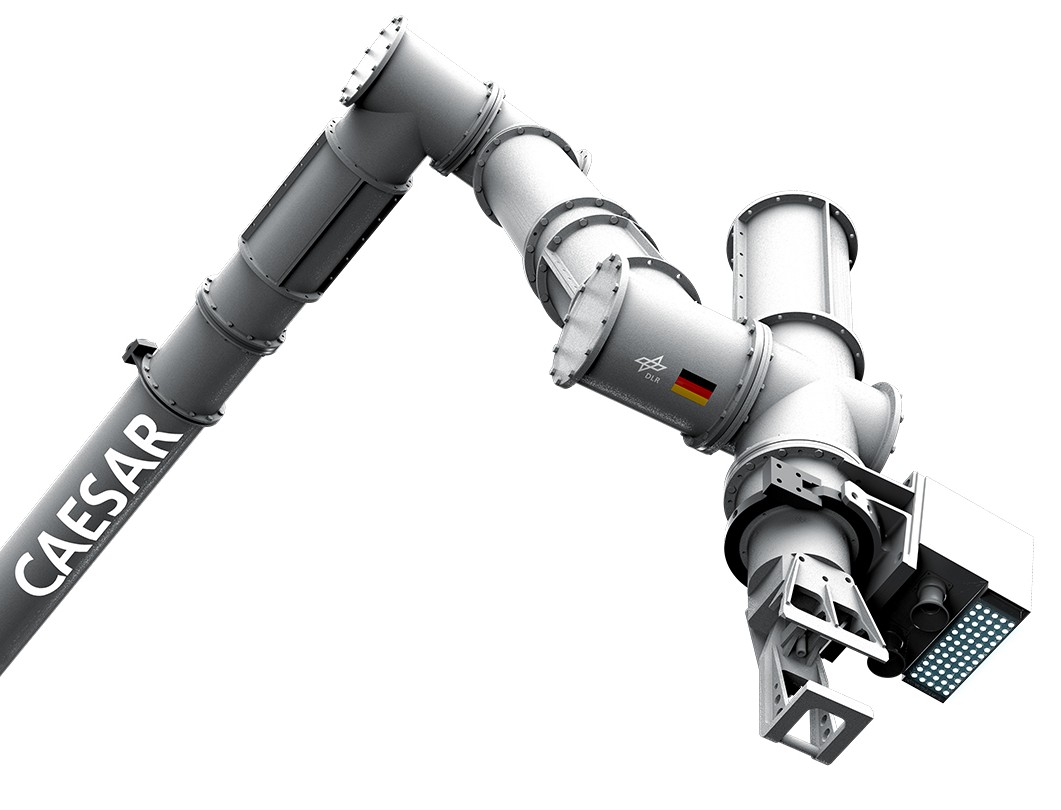
Conceptualization of a Reduced-Complex Cable-Based Gravity Compensation System for Space Manipulator On-Ground Tests
Robotics is primed to play a crucial role in future space missions. By performing tasks such as on-orbit servicing, inspection and de-orbiting, space robotics can enable a sustainable use of Earth’s orbits. The DLR’s Compliant Assistance andExploration SpAce Robot (CAESAR) is a light-weight, dexterous robot with seven degrees of freedom designed for on-orbit servicing in
-
On-Ground Dynamics Parameter Identification and Force Distribution Analysis of a Gravity-Compensated Space Manipulator Robot
Robotics is primed to play a crucial role in future space missions. By performing tasks such as on-orbit servicing, inspection and de-orbiting, space robotics can enable a sustainable use of Earth’s orbits. The DLR’s Compliant Assistance and Exploration SpAce Robot (CAESAR) is a light-weight, dexterous robot with seven degrees of freedom designed for on-orbit servicing
-
Beach Cleaner Project from BCC
The Beach Cleaner Project focuses on developing a lightweight, practical, and affordable tool designed to clean beaches efficiently from plastics, general debris and natural material, without compromising the natural environment. The aim is to create a user-friendly solution that allows anyone to maintain coastal areas and beachfront properties, such as hotels and beach clubs in a
-
Theoretical Performance of Magnetohydrodynamic Propulsion Systems Using Superconducting Magnets
Magnetohydrodynamic (MHD) propulsion involves the interaction between magnetic fields and conductive fluids to generate thrust, a technology with potential applications in advanced marine and aerospace vehicles. This thesis focuses on designing and analyzing MHD propulsion systems that utilize superconducting magnets, which offer significant advantages in terms of magnetic field strength and efficiency compared to conventional
-
Active/Adaptive Morphing Propellers for Enhancing Critical Cavitation Speed and Performance
The thesis focuses on the development and analysis of a morphing system for a boat propeller, aiming to increase the critical cavitation speed. Cavitation, a phenomenon that can impair the performance and durability of propellers, occurs when local pressure drops below the vapor pressure, leading to the formation of vapor bubbles that collapse, causing noise
-

Real-time optimal transport of robotic swarms in fluids in 3D domains
Optimally guiding large-scale swarms of drones, underwater vehicles or nanoparticles moving in a fluid is a crucial task in several fields, ranging from medicine to smart delivery. To steer the swarm dynamics avoiding obstacles, controllers must be able to rapidly adapt the optimal action to changes in the external environment, as often happen in applications.