-

Bridging Simulation and Reality for Autonomous Underwater Vehicles
Autonomous Underwater Vehicles (AUV) are subject to highly non-linear hydrodynamic forces, significant parametric uncertainty, and unpredictable environmental disturbances, all of which make robust low-level control a persistent open challenge. This thesis investigates control strategies for AUV motion control with a focus on robustness, the ability of a controller to maintain acceptable performance despite uncertainty in vehicle parameters and environmental conditions. The work begins with a survey of available simulation environments for AUV dynamics, characterising how different tools model hydrodynamic effects and how their predictions diverge under parameter variations. Building on this, a systematic study of parametric uncertainty is conducted, varying… Read more
-
Fall Recovery for Quadrupeds
Introduction Legged robots operating in real-world environments are inevitably exposed to disturbances, uneven terrain, and interaction forces that can lead to loss of balance and falls. Robust fall recovery is therefore a critical capability for enabling truly autonomous deployment of quadruped robots in unstructured settings. While traditional approaches rely on hand-crafted reflexes or carefully engineered controllers, these methods often struggle to generalize beyond a narrow set of scenarios. In this thesis, we propose to investigate Reinforcement Learning (RL) methods for fall recovery in quadruped robots. The core idea is to learn feedback policies that, given a potentially high-impact post-fall state… Read more
-

Fall Recovery for Humanoid Robots
Introduction Humanoid robots are designed to operate in human-centered environments, where unexpected contacts, uneven terrain, and external disturbances frequently lead to loss of balance and falls. Reliable fall recovery is therefore a key capability for long-term autonomous operation and human–robot coexistence. Classical approaches rely on carefully engineered whole-body controllers and pre-defined get-up sequences, which are often tailored to a specific robot morphology and a limited set of fall configurations, making generalization difficult. In this thesis, we propose to investigate Reinforcement Learning (RL) methods for fall recovery in humanoid robots. The core idea is to learn whole-body control policies that, starting… Read more
-
Actuator Modeling
Introduction Recent advances in GPU-based physics simulation and deep Reinforcement Learning (RL) have enabled the rapid training of control policies for complex, highly articulated robots such as quadrupeds and humanoids. Parallelized simulators now make it possible to obtain policies that transfer to hardware in a matter of minutes of simulated experience [1]. Despite this progress, a significant discrepancy often remains between performance in simulation and on the real robot, commonly referred to as the Sim2Real gap. This gap arises from several sources along the RL control pipeline [2, 3, 4]. First, the reality gap captures mismatches between simulated and real-world… Read more
-
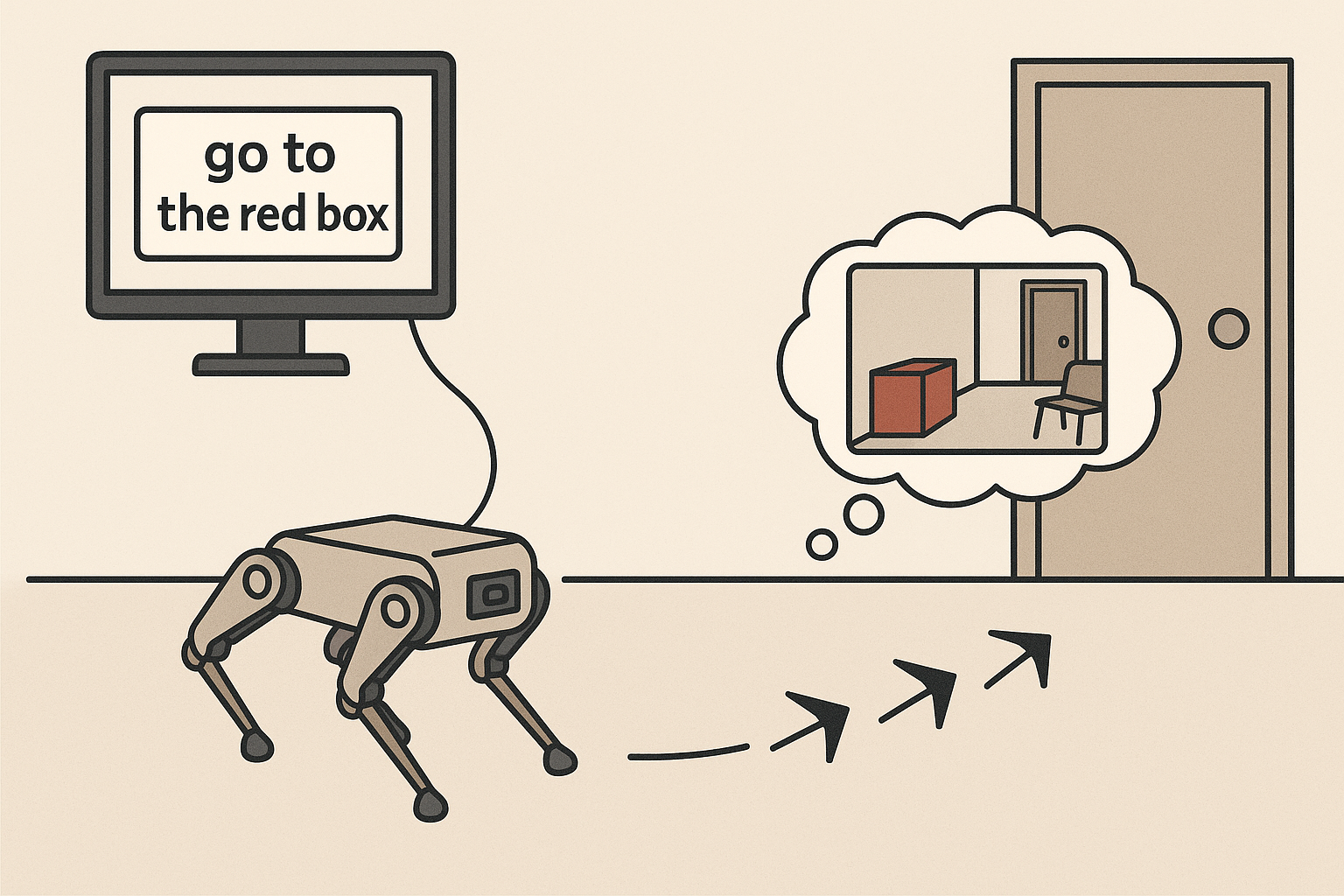
VLAs for Navigation
Introduction Vision-Language-Action (VLA) models have recently emerged as a powerful paradigm for grounding natural-language instructions in perception and control, enabling robots to execute high-level commands specified in human-friendly terms. In this project, we consider a navigation setting in which a mobile robot (Unitree GO2) receives an egocentric RGB-D observation together with a short natural-language instruction (e.g., ‘go to the red box’,’come to the door’) and must output low-level navigation commands (such as velocities or waypoints) that drive it toward the described target [1,2]. Conditioning actions on language offers several advantages over traditional goal specification mechanisms (e.g., manually defined goal coordinates… Read more
-

Quadruped Teleoperation System
Introduction Reinforcement Learning (RL) has recently enabled agile and dynamic behaviors in legged robots. However, RL alone is not always the most suitable tool, especially for sparse, long-horizon tasks that involve complex object manipulation. Even with careful problem formulation, reward design, and curriculum learning, such tasks can remain difficult to solve using standard RL methods. Imitation-based approaches such as Behavioral Cloning, Imitation Learning, and Adversarial Motion Priors (AMP) have emerged as powerful alternatives for these scenarios, as they can leverage existing datasets that demonstrate the desired behavior. These datasets may come from human demonstrations (e.g., videos and teleoperation), optimal controllers,… Read more