Tag: control
-
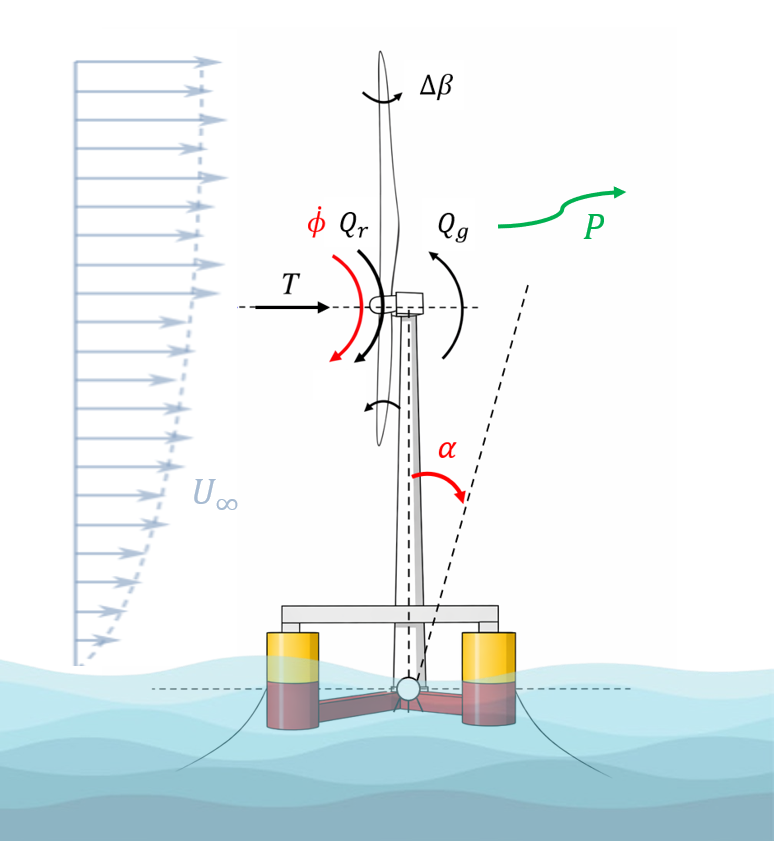
Multi-Objective Control Synthesis for Floating Wind Turbines
We are looking for a motivated and passionate student to contribute to our research in the field of wind energy and to work on a topic with strong scientific and industrial relevance. Floating wind turbines are complex systems, in which aerodynamics, hydrodynamics, structural dynamics, and control systems are strongly coupled. This multi-physics interaction makes the
-

Optimality assessment of an NMPC-based GLOSA system
Introduction The assessment of solution optimality is a crucial aspect in the design of real-time control strategies for intelligent transportation systems. In the context of Green Light Optimal Speed Advisory (GLOSA), Nonlinear Model Predictive Control (NMPC) is widely adopted due to its ability to handle system constraints and nonlinear vehicle dynamics while operating in real
-

Development of a centralized eco-driving system
Introduction Centralized eco-driving systems exploit vehicle-to-infrastructure (V2I) communication to coordinate vehicle speed profiles based on traffic signal and network information. By enabling predictive and cooperative driving, it reduces energy consumption, emissions, and travel time, while improving traffic flow efficiency and driving comfort. Goals This thesis proposes the development of a smart traffic light control system
-

ADS Safety, Monitoring and Reporting Topics in collaboration with JRC (Ispra)
Introduction The Joint Research Centre (JRC) is the European Commission’s science and knowledge service, providing independent scientific advice and evidence to support EU policymaking. JRC in Ispra (Italy), is one of the European Commission’s major research campuses.This thesis “umbrella” collects potential topics inspired by those lectures, with a focus on safety-oriented analysis for Automated Driving
-
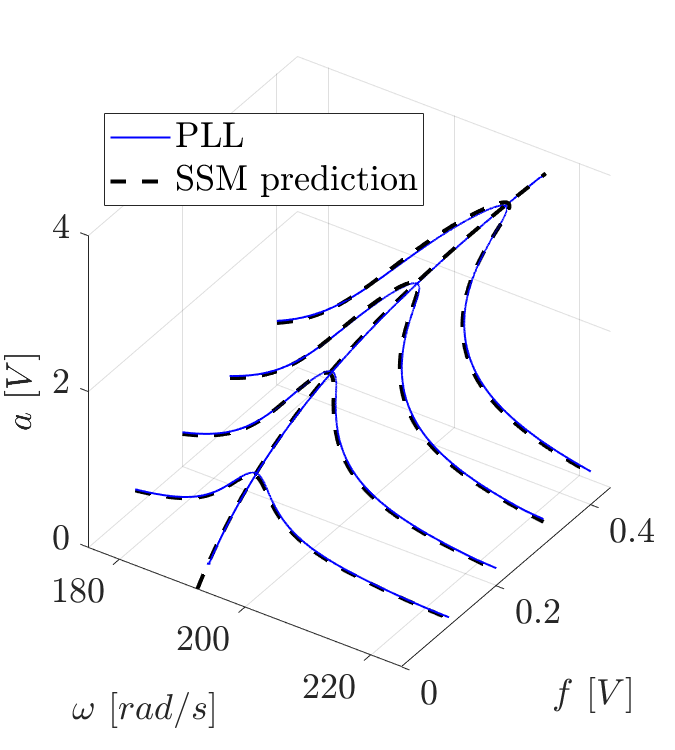
SSM-enhanced Control-Based Continuation (CBC)
In this project we aim to experimentally determine the backbone and the frequency response of a system using Control Based Continuation. CBC consists, loosely speaking, in creating a phase controller (PLL, Phase-Locked Loop) to lock a system at resonance (90°) and then extract the backbone by increasing the forcing with continuation algorithms, typical of numerical
-
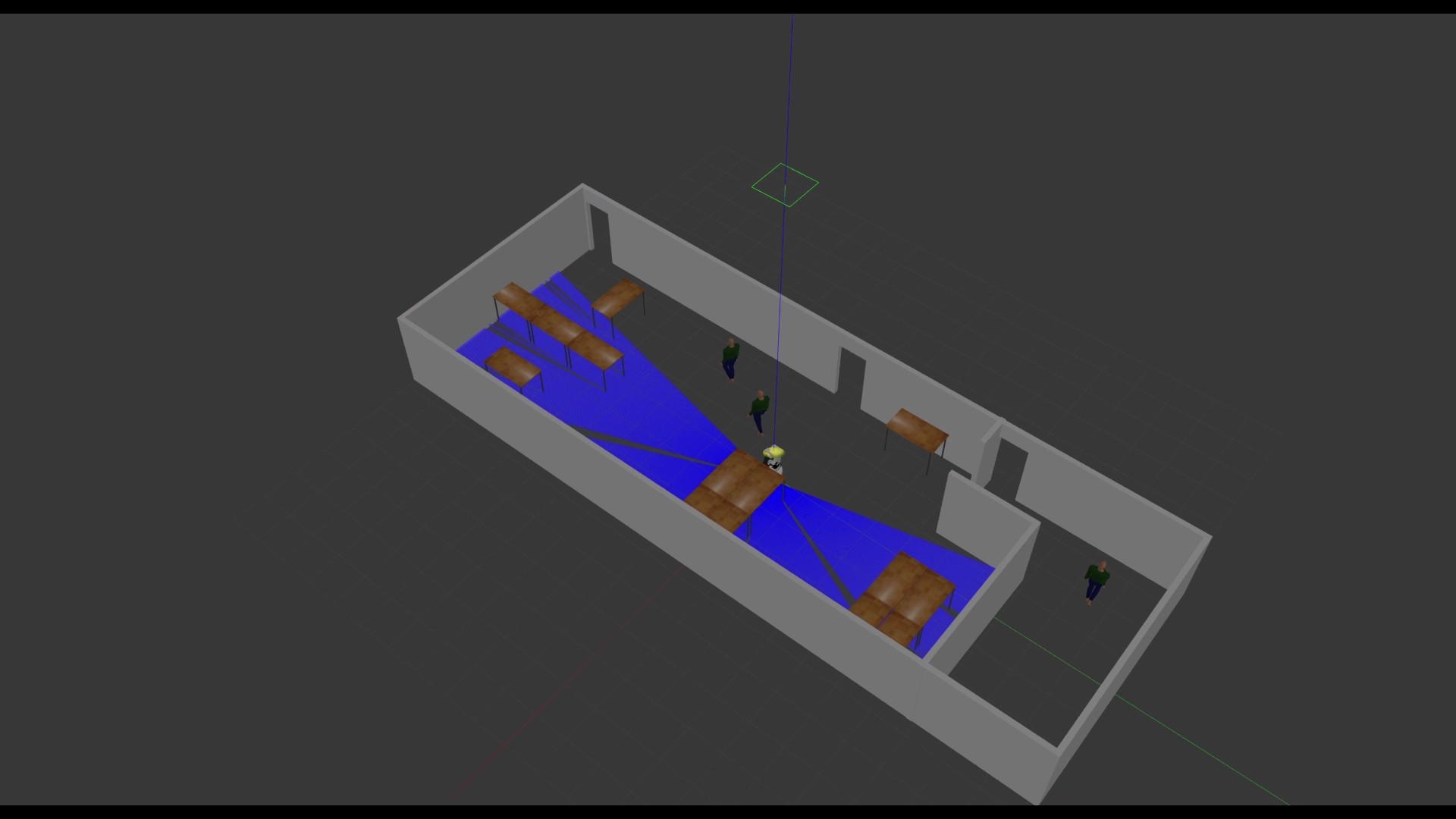
A robotic walking assistant for older adults in long-term care
Assistance and monitoring during elders’ daily walk is something that stakeholders expect from an assistive robot. Though cart-like walkers represent a possible solution, they are limited in versatility. Contrarily, a humanoid walking assistant has the potentiality to accomplish many other tasks and to engage in social interactions, extending the caregivers’ activity. The student will develop
-

Agents for Competitive Multi-Agent Autonomous Vehicle Racing: Learning-based vs Model-base
High-speed, multi-agent autonomous vehicle racing demands agents that can make split-second decisions while strategically interacting with unpredictable opponents. This thesis will develop a learning-based racing agent and a model-based one both capable of long-term reasoning, balancing raw speed with tactical maneuvers, and benchmark their performance under head-to-head competition. Requirements and tools Contacts: Michael Khayyat, Stefano