Author: Jacopo Marconi
-
Experimental nonlinear identification of a pantograph model using CBC techniques
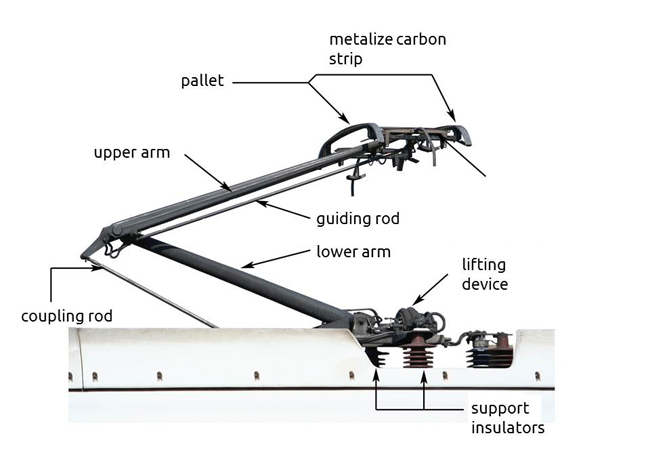
This thesis focuses on the nonlinear identification of a railway pantograph using Control-Based Continuation (CBC), a class of experimental techniques that enables the reconstruction of the nonlinear frequency response of a system under closed-loop operation. The goal is to develop and validate a methodology to identify the main nonlinear features of the pantograph, such as…
-
Topology Optimization in nonlinear dynamics: internal and parametric resonances
This content is restricted.
-
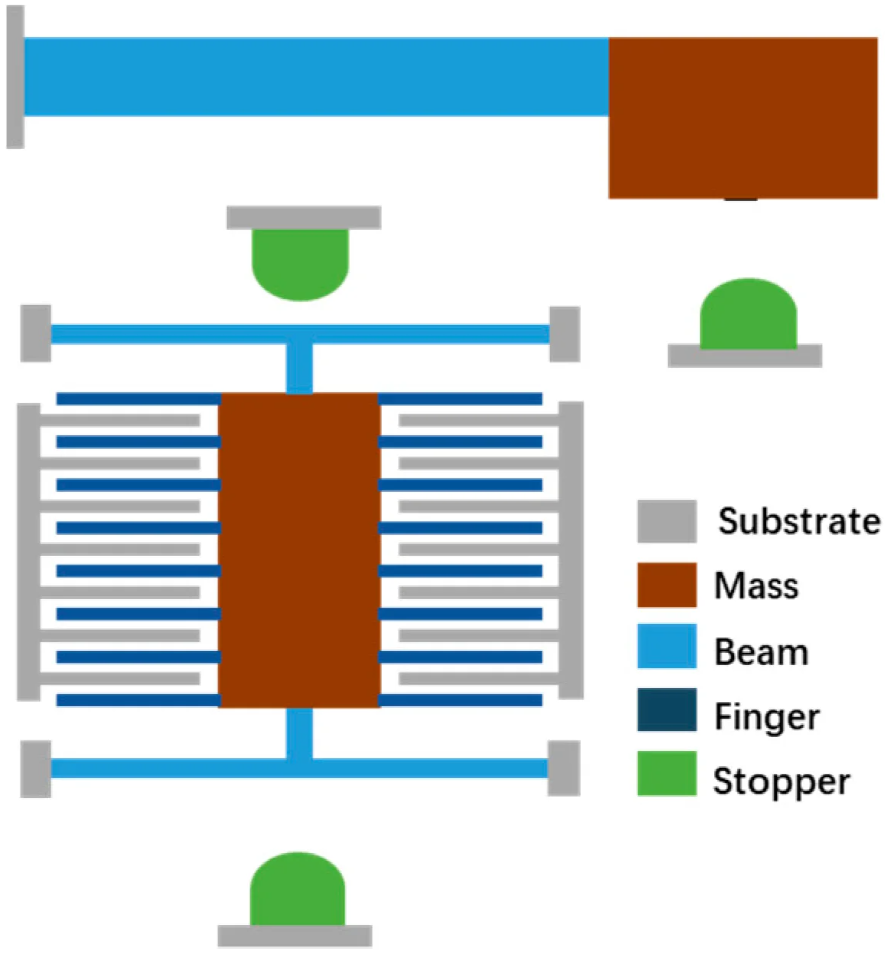
Mechanical nonlinearities (Geometric or Contact) in inertial MEMS sensors
Mechanical nonlinearities play an important role in inertial MEMS sensors and cannot be avoided. The trend to push the performance to the limits caused second-order nonlinear effects to become a critical phenomenon that must be considered: these effects are already visible and characterized on mass production devices. External shocks and vibrations could also induce other…
-
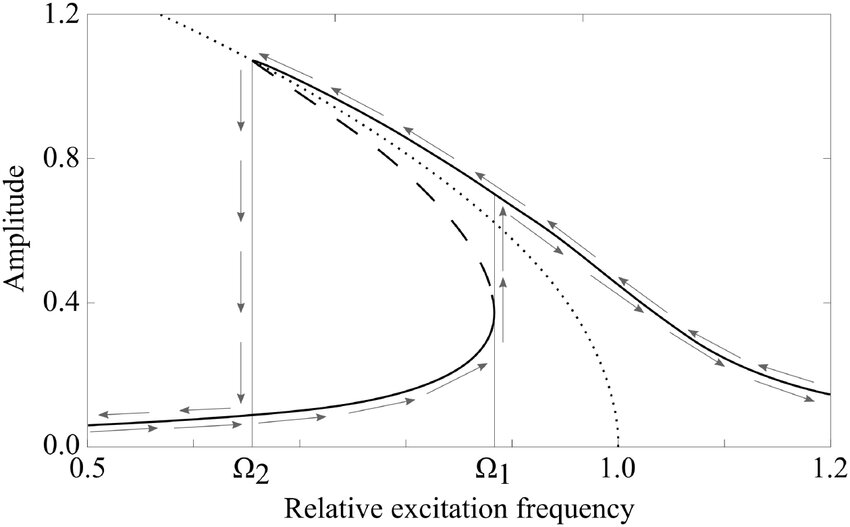
Experimental characterization of nonlinear motion of MEMS resonators
Mechanical nonlinearities play an important role in inertial MEMS sensors, in particular due to geometrical and process constraints. The trend to push the performance to the limits caused second-order nonlinear effects to become a critical phenomenon that must be taken into account: these effects are already visible and characterized on mass production devices. Several methods…
-
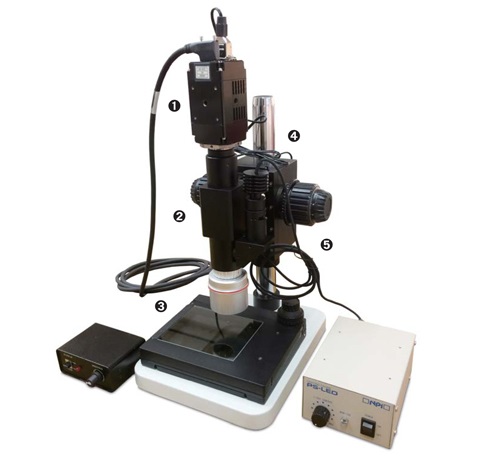
Out-of-plane stroboscopic analysis of MEMS motion sensors
Goal: implement a system for optical stroboscopic analysis of TDK’s MEMS accelerometers and gyroscopes, aimed at the characterization of out-of-plane resonant modes in those devices Strategy: enhance TDK’s existing system for in-plane stroboscopic optical analysis, based on the usage of infrared microscope and synchronously controlled light source, to add the out-of-plane capability. Work phases Estimated…
-
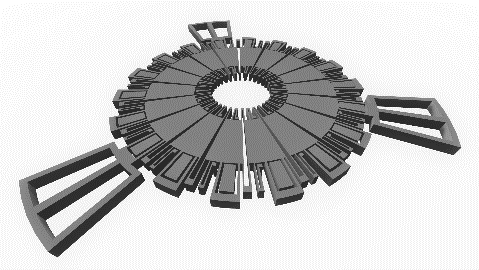
Design of a metamaterial for a novel MEMS mechanical circulator
Several works in literature and from our research group have shown that periodic structures with space-time varying properties lead to a non-symmetric (non-reciprocal) response. In short, in some frequency intervals (band gaps), these metamaterials allow the propagation of waves only in one direction and block them in the opposite direction. This thesis aims to design…
-
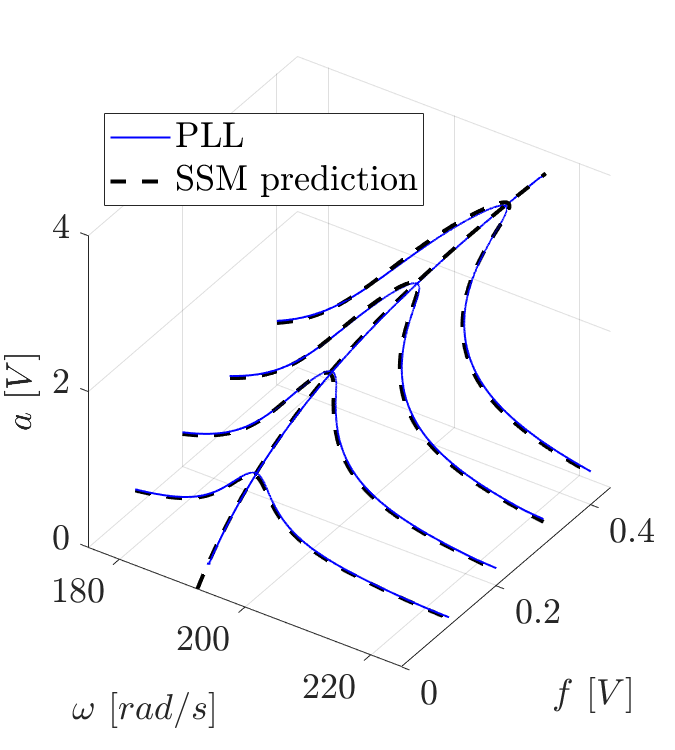
SSM-enhanced Control-Based Continuation (CBC)
In this project we aim to experimentally determine the backbone and the frequency response of a system using Control Based Continuation. CBC consists, loosely speaking, in creating a phase controller (PLL, Phase-Locked Loop) to lock a system at resonance (90°) and then extract the backbone by increasing the forcing with continuation algorithms, typical of numerical…
-
Contact dynamics in inertial MEMS sensors
Nowadays, mechanical robustness is a key spec for inertial MEMS sensors. The contacts occurring in silicon structures are a relevant problem that may generate dangerous particles or even cause the breakage of the MEMS sensor. Despite these critical phenomena impacting the sensor’s manufacturing and lifetime functionality, the modeling approaches currently adopted are too simplified. The…
-
Active & passive meta-MEMS devices for signal processing
During this thesis, the student will design a multifunctional metastructure at the micro-scale, where a tailored arrangement of unit cells allows performing certain operations to an incoming elastic signal. Examples that we want to explore are (i) performing derivative/integrals and arbitrary transfer functions, (ii) frequency conversion, (iii) Wave-diode effect (nonreciprocity), (iv) waveguiding, trapping and focusing.…
-
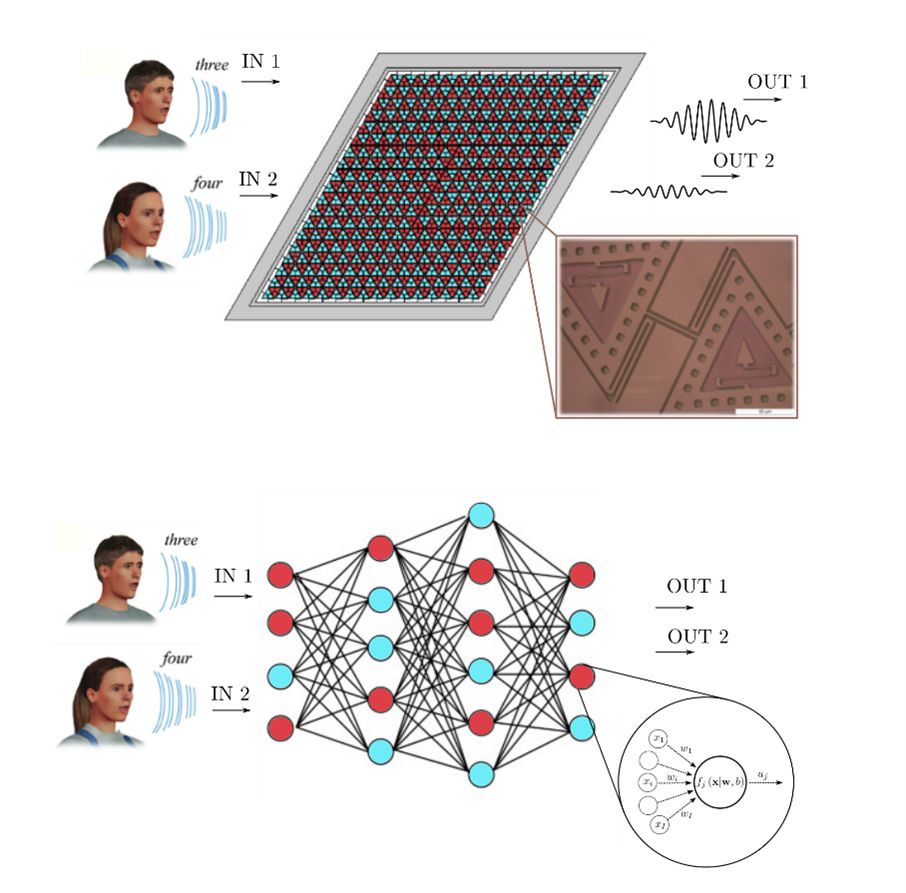
Substructuring techniques and pROMs for the optimization of a MEMS voice recognition device
This thesis aims to develop strategies to alleviate the computational burden of optimising a novel, purely mechanical voice recognition device. The device is composed of many repeated cells, each slightly varied through parametric optimisation of a high-fidelity finite element model with millions of degrees of freedom. Direct simulation of such models is computationally prohibitive, making…