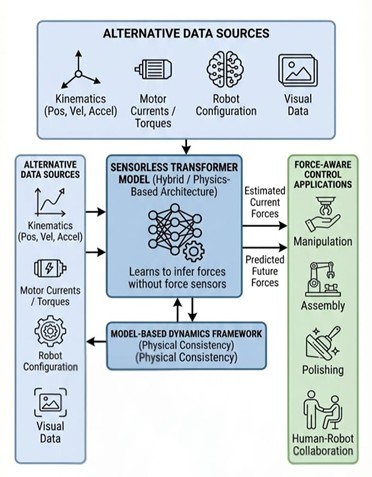
While recent work has shown that generative AI models, like transformers, can be used to predict future interaction forces, given past recorded data, including recorded forces, many platforms lack force sensors or cannot reliably record past forces. To bridge this gap, this thesis aims to augment a transformer model so it can estimate current interaction forces and forecast future forces without relying on historical force measurements. The core idea is to identify and integrate alternative data sources – such as kinematic signals (e.g., Cartesian position, velocity, acceleration), motor currents or torques, robot configuration, and possibly visual data – into a hybrid or physics-based architecture where the transformer learns to infer forces “sensorlessly”. The objective includes designing data collection experiments on representative tasks, like human-robot collaboration; developing and training the transformer-based estimator to map available data to current and future force estimates; integrating a model-based dynamics framework to enforce physical consistency and real-time performance; and validating the approach in simulation and on real robotic platforms under varying contact scenarios and uncertainties. Ultimately, the expected outcome is a robust, real-time sensorless force estimation and prediction module that broadens the applicability of force-aware control to robots without force sensors, enhancing safety and adaptability in manipulation, assembly, polishing, exoskeleton assistance, and other interaction tasks, and contributing novel insights on hybrid model-based and generative-AI methods for force inference in robotics.
Contact: charbel.barsomian@polimi.it, loris.roveda@polimi.it