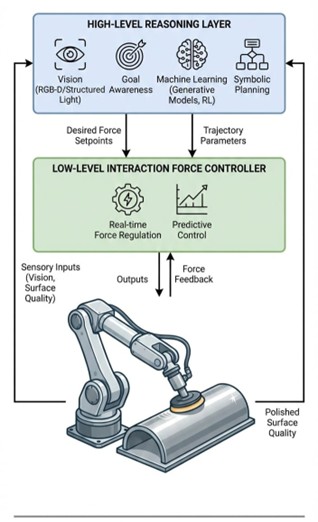
This thesis proposes to equip an existing low-level predictive interaction force controller – developed for compliant tasks- with a high-level reasoning layer that autonomously manages polishing operations. While the force controller reliably regulates contact forces and nominal trajectories in real time, it lacks environmental context and goal awareness. The research goal is to design and implement a reasoning module that processes sensory inputs, for example, vision-based (RGB-D or structured light vision of the workpiece, surface quality metrics, and task specifications) to dynamically generate, and maybe adjust, the desired force setpoints and trajectory parameters for the lower-level controller. Key objectives include: (1) surveying and selecting suitable machine‑learning paradigms—such as generative models for surface feature inference, reinforcement learning (e.g., DQN or actor‑critic methods) for policy optimization, or hybrid approaches combining symbolic planning with neural networks—justified by their sample efficiency, interpretability, and real‑time feasibility; (2) defining the sensor suite and data‑collection protocol, including ground‑truth force recordings and visual/geometry datasets of varied polishing tasks; (3) developing the high‑level model to map task goals and visual observations to controller commands, with online adaptation to changing material properties or tool wear; and (4) integrating the layers in simulation and on a real robotic cell to evaluate surface finish quality, process efficiency, and system robustness. The expected outcome is a modular reasoning framework that enables truly autonomous, adaptive polishing – and by extension, other contact-oriented tasks – thereby advancing layered and hybrid control architectures in robotics.
Contact: charbel.barsomian@polimi.it, loris.roveda@polimi.it