-

Effectiveness of GLOSA in mixed traffic conditions
GLOSA (Green Light Optimal Speed Advisory) can significantly improve traffic flow by helping drivers adjust their speed to pass through intersections during green phases, thereby reducing unnecessary stops, delays, and congestion. This results in smoother driving patterns and lower emissions. However, the effectiveness of GLOSA depends on factors such as traffic density and the market penetration of connected and automated vehicles. The aim of this thesis is to conduct a traffic microsimulation study to evaluate the effectiveness of state-of-the-art GLOSA systems for connected vehicles. The simulations will assess how traffic performance changes when different proportions of vehicles or drivers comply… Read more
-
Development of a multi-vehicle GLOSA
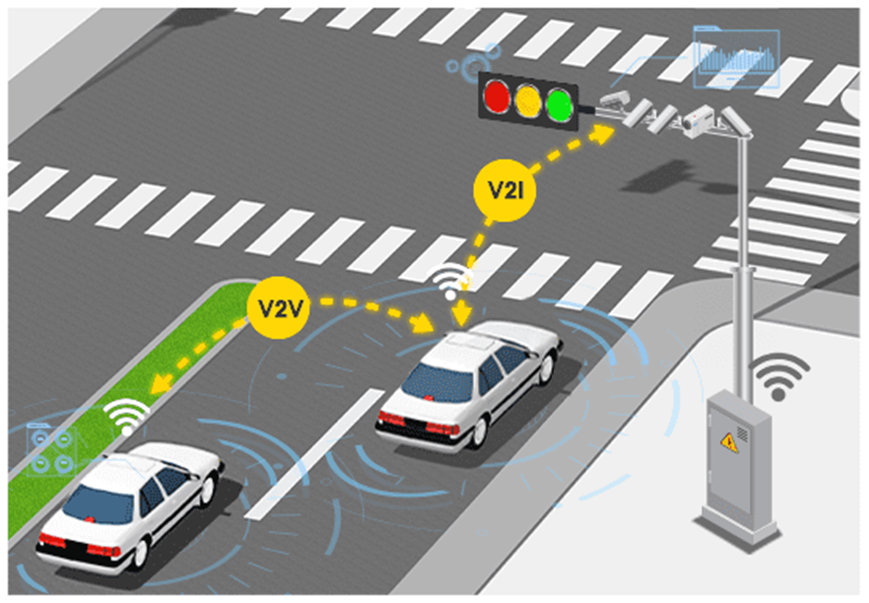
The Green Light Optimal Speed Advisory (GLOSA) is one of the most significant applications in intelligent transportation systems. Existing GLOSA methods compute an advisory speed profile that allows a vehicle to reach one or more intersections during the green phase, thereby reducing travel time and fuel consumption. However, current GLOSA approaches optimize the speed of a single vehicle only, without ensuring that the vehicles following it can also pass the intersection(s) during the green phase, thus limiting potential improvements in overall traffic flow. This thesis aims to develop an enhanced, multi-vehicle extension of the GLOSA system. By leveraging V2I (Vehicle-to-Infrastructure)… Read more
-

Optimizing indoor tyre testing for repeatable, comparable data
The enhancement of virtual engineering demands continuous improvement in tyre modelling capabilities and in the consistency of model development processes. Most tyre models are parameterized using flat-trac machines equipped with sandpaper belts that simulate road surfaces. While these tests generally provide a reliable representation of tyre behaviour, achieving high repeatability and ensuring comparability across different testing machines remain open challenges. Variations can arise from several sources, including sandpaper belt wear, differences in machine control systems and tyre wear/aging. The recently introduced Standard Reference Test Tyre (SRTT) offers a potential benchmark for assessing and quantifying these variations. However, a standardized testing… Read more
-

Correlation and scaling of indoor to outdoor tyre behaviour
Tyre behaviour is traditionally assessed through indoor tests performed on flat-track machines and outdoor tests conducted with skid-trailers. However, discrepancies frequently arise between indoor and outdoor results. These differences stem from several factors, including: The aim of this thesis is to investigate the root causes of these discrepancies and to improve the correlation between indoor and outdoor tyre behaviour. The work will include: Contacts: Edoardo Sabbioni, Michele Vignati, Francesco Colombo Industrial partner(s): Pirelli Tyre Read more
-
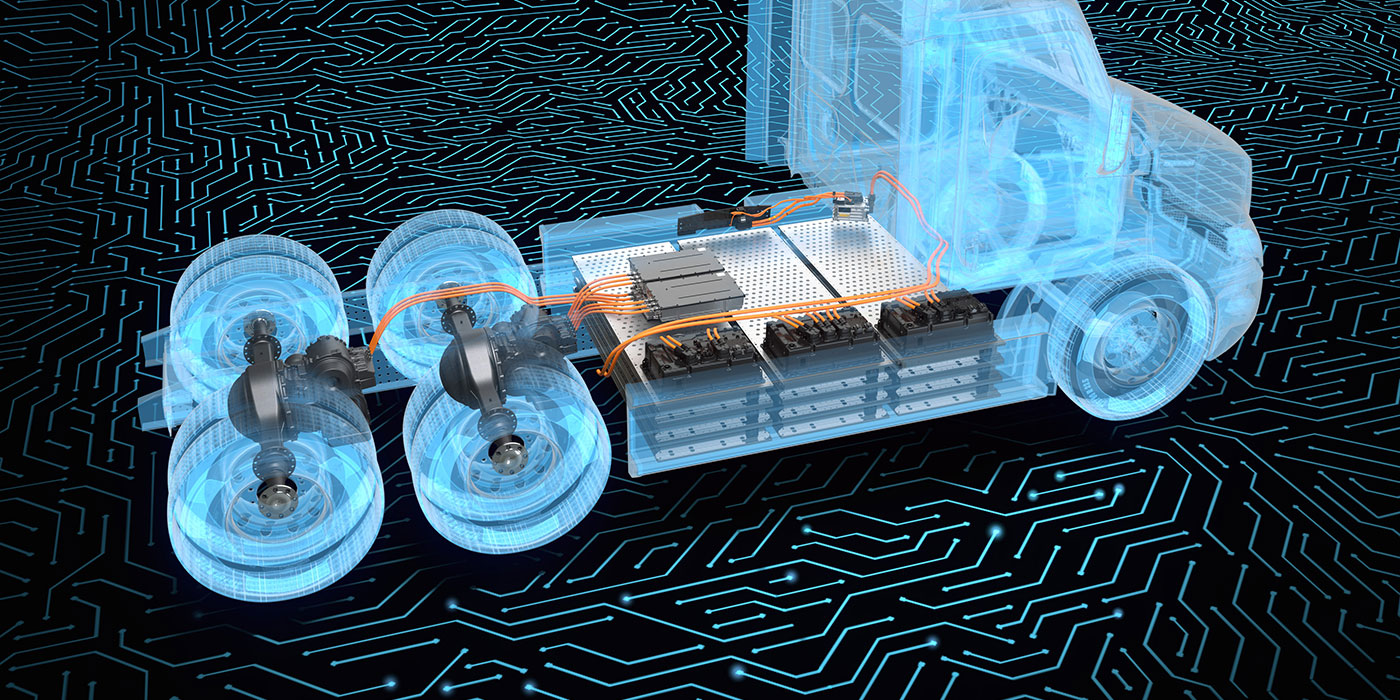
Modeling and control of hybrid powertrain for heavy duty vehicles
This thesis focuses on the modeling and control of hybrid powertrains for heavy-duty vehicles. A comprehensive dynamic model of the powertrain is developed, accounting for the interaction between the internal combustion engine, electric machines, energy storage system, and transmission. Control strategies for power split, energy management, and drivability optimization are investigated under representative operating conditions. The study aims to improve fuel efficiency, emissions, and overall system performance, providing guidelines for the design and control of hybrid architectures in heavy-duty applications. Contacts: michele.vignati@polimi.it; davide.tarsitano@polimi.it Read more
-
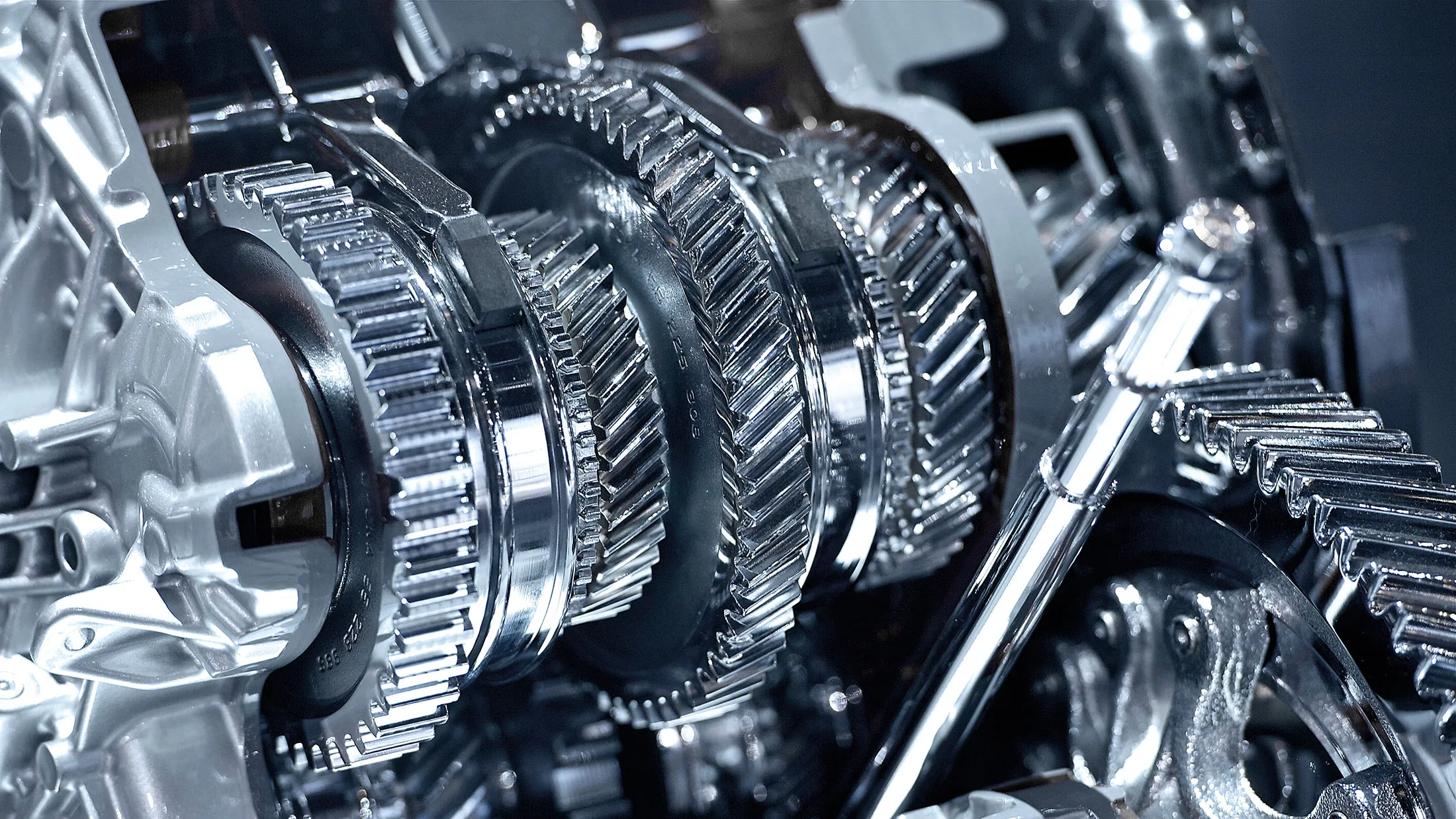
Non-linear analysis of powertrain torsional vibration accounting for backlash
This thesis investigates the non-linear torsional vibration behavior of automotive powertrains, explicitly accounting for backlash effects in transmission components. A lumped-parameter dynamic model is developed to represent dead-zone non-linearities, intermittent contact, and impact phenomena. Time- and frequency-domain analyses are performed to study the influence of operating conditions, torque excitation, and system parameters on the dynamic response and stability of the powertrain. Contacts: michele.vignati@polimi.it, edoardo.montini@polimi.it Read more
-

Optimality assessment of an NMPC-based GLOSA system
Introduction The assessment of solution optimality is a crucial aspect in the design of real-time control strategies for intelligent transportation systems. In the context of Green Light Optimal Speed Advisory (GLOSA), Nonlinear Model Predictive Control (NMPC) is widely adopted due to its ability to handle system constraints and nonlinear vehicle dynamics while operating in real time. However, NMPC solutions for non-convex problems such as GLOSA may end up in local minima, as they rely on finite horizons and computational approximations. Goals The aim of this thesis is to evaluate the optimality of an NMPC-based GLOSA system by comparing its solutions… Read more
-

Development of a centralized eco-driving system
Introduction Centralized eco-driving systems exploit vehicle-to-infrastructure (V2I) communication to coordinate vehicle speed profiles based on traffic signal and network information. By enabling predictive and cooperative driving, it reduces energy consumption, emissions, and travel time, while improving traffic flow efficiency and driving comfort. Goals This thesis proposes the development of a smart traffic light control system capable of dynamically managing signal phase durations to optimize traffic flow across multiple interconnected intersections. The proposed controller aims to reduce congestion, travel time, and stop-and-go behaviour by adapting signal timings in real time based on traffic demand. Unlike traditional fixed-time or isolated adaptive controllers,… Read more
-

Manual-Driving Data Acquisition System for Dataset Creation in Unstructured Private Areas with VRU Interaction
Introduction High-quality datasets are a key enabler for data-driven methods in autonomous driving and mobile robotics. This is particularly true in unstructured environments and private areas (e.g., campuses, industrial sites, private roads), where vehicle behavior and interactions can differ substantially from public-road scenarios. In these contexts, collecting representative data of vehicle operation and VRU (Vulnerable Road Users) interactions is essential to support the development and validation of perception, prediction, and motion planning algorithms. Goals This thesis aims to define and implement a manual-driving data acquisition pipeline for dataset creation. The main goal is to design a robust, reusable acquisition setup… Read more
-

Industry-Driven Topics in AV Software, Teleoperation and Fleet Management with Tecnocad Group
Introduction This thesis “umbrella” is developed in interaction with Tecnocad Group, an Italian engineering company operating across mobility sectors and providing end-to-end engineering development from concept to production.Tecnocad Group delivered a guest presentation within the course, outlining several industry-relevant directions that can be shaped into a thesis topic depending on the interests and technical profile of the student. Goals Thesis topics will be defined case by case through discussion with Tecnocad Group and based on the skills of interested students, and refined after an initial introductory meeting. Example areas proposed during the course include autonomous-vehicle software development, teleoperation, and fleet… Read more
-

ADS Safety, Monitoring and Reporting Topics in collaboration with JRC (Ispra)
Introduction The Joint Research Centre (JRC) is the European Commission’s science and knowledge service, providing independent scientific advice and evidence to support EU policymaking. JRC in Ispra (Italy), is one of the European Commission’s major research campuses.This thesis “umbrella” collects potential topics inspired by those lectures, with a focus on safety-oriented analysis for Automated Driving Systems (ADS). Goals Thesis topics will be defined case by case starting from the suggestions discussed during the JRC lectures, and refined after an initial introductory meeting. For a first overview of possible directions, students are encouraged to review the lecture recording(s). Example themes include:… Read more
-
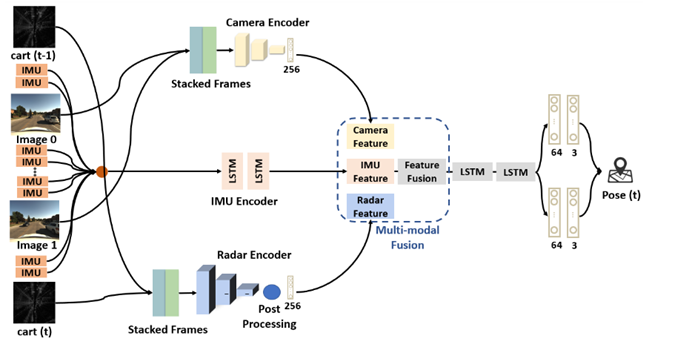
Dataset-Driven Robust Ego Localization for Autonomous Vehicles in Challenging Sensing Conditions
Introduction Robust ego-vehicle localization is a core requirement for autonomous driving. In real-world operation, performance can degrade due to adverse weather and non-ideal sensor behavior, such as dropouts, partial failures, miscalibration, or temporal misalignment. This thesis topic focuses on dataset-driven, learning-based approaches to improve localization robustness in multi-sensor settings, with systematic experimental evaluation. Goals This thesis aims to explore data-driven methods for robust ego-vehicle localization in a multi-sensor context. The specific objective, dataset(s), and sensor configuration will be defined case by case based on the student’s interests and background, and refined after an initial introductory meeting. Validation will be carried… Read more
-

Agents for Competitive Multi-Agent Autonomous Vehicle Racing: Learning-based vs Model-base
High-speed, multi-agent autonomous vehicle racing demands agents that can make split-second decisions while strategically interacting with unpredictable opponents. This thesis will develop a learning-based racing agent and a model-based one both capable of long-term reasoning, balancing raw speed with tactical maneuvers, and benchmark their performance under head-to-head competition. Requirements and tools Contacts: Michael Khayyat, Stefano Arrigoni Read more