-

Severity-Guided Adaptive Sensor Fusion: A Dynamic Weighting Framework for Resilient Autonomous Navigation under Sensor Failures
Introduction Reliable operation of Autonomous Vehicles relies heavily on multi-modal sensor fusion (combining Camera, LiDAR, and Radar) to compensate for individual sensor weaknesses. However, standard deep learning fusion architectures typically operate under the assumption of nominal sensor health. Consequently, they lack a fail-safe mechanism to handle corrupted data streams caused by environmental degradation (e.g., severe Read more
-

4DRadar-Guided Generative Inpainting: Robust LiDAR Restoration via Latent Diffusion Models under Sensor Failures and Adverse Weather
Introduction LiDAR sensors are the backbone of precise 3D perception in autonomous vehicles, but they suffer from significant degradation in adverse weather (scattering in fog/rain) and are prone to hardware failures. While traditional filtering removes noise, it leaves geometric gaps that can blind downstream detectors. Conversely, 4D Imaging Radar is resilient to weather but lacks Read more
-

Mamba-Driven Robust Navigation: Efficient Long-Sequence State Space Models for 4D Radar and Multi-Modal SLAM
Introduction Reliable Simultaneous Localization and Mapping (SLAM) in adverse weather remains a significant challenge for autonomous driving. While LiDAR sensors offer high geometric precision, they are prone to signal degradation in rain, fog, and snow. Conversely, 4D Imaging Radar provides superior resilience and dynamic Doppler information but suffers from inherent sparsity, multipath noise, and lower Read more
-
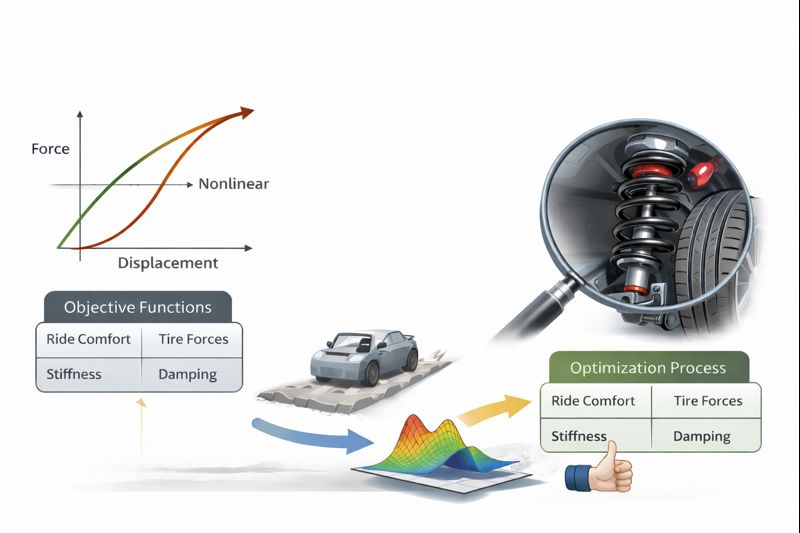
Study and Optimization of Automotive Suspension Systems Considering Nonlinear Dynamics
Automotive suspension systems play a fundamental role in determining vehicle ride comfort, road holding, and overall handling performance. Modern vehicles operate over a wide range of driving conditions in which suspension components exhibit significant nonlinear behavior due to geometric effects, nonlinear stiffness characteristics, damping properties, and the interaction with road irregularities. The aim of this Read more
-
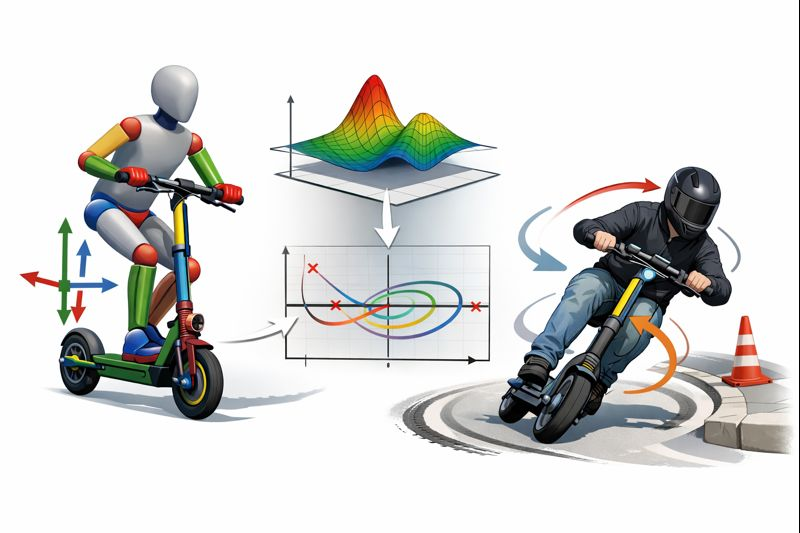
Lateral Dynamics and Stability Analysis of Electric Scooters
The rapid diffusion of electric scooters as a means of urban transportation has raised significant concerns regarding their dynamic stability and rider safety, particularly in lateral maneuvers such as cornering, obstacle avoidance, and low-speed balancing. Despite their widespread use, the lateral dynamics of electric scooters remain less investigated than those of motorcycles or bicycles, especially Read more
-

Effectiveness of GLOSA in mixed traffic conditions
GLOSA (Green Light Optimal Speed Advisory) can significantly improve traffic flow by helping drivers adjust their speed to pass through intersections during green phases, thereby reducing unnecessary stops, delays, and congestion. This results in smoother driving patterns and lower emissions. However, the effectiveness of GLOSA depends on factors such as traffic density and the market Read more
-
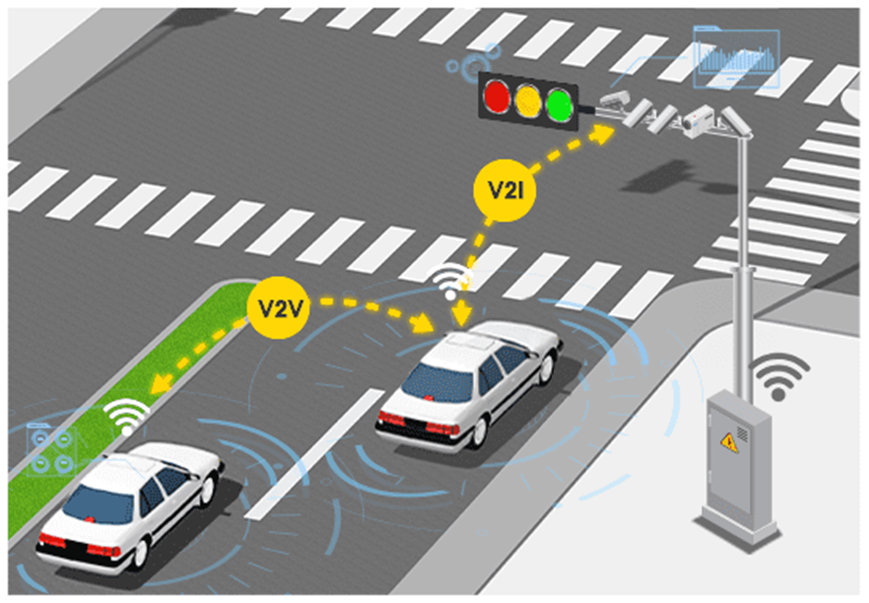
Development of a multi-vehicle GLOSA
The Green Light Optimal Speed Advisory (GLOSA) is one of the most significant applications in intelligent transportation systems. Existing GLOSA methods compute an advisory speed profile that allows a vehicle to reach one or more intersections during the green phase, thereby reducing travel time and fuel consumption. However, current GLOSA approaches optimize the speed of Read more
-

Optimizing indoor tyre testing for repeatable, comparable data
The enhancement of virtual engineering demands continuous improvement in tyre modelling capabilities and in the consistency of model development processes. Most tyre models are parameterized using flat-trac machines equipped with sandpaper belts that simulate road surfaces. While these tests generally provide a reliable representation of tyre behaviour, achieving high repeatability and ensuring comparability across different Read more
-

Correlation and scaling of indoor to outdoor tyre behaviour
Tyre behaviour is traditionally assessed through indoor tests performed on flat-track machines and outdoor tests conducted with skid-trailers. However, discrepancies frequently arise between indoor and outdoor results. These differences stem from several factors, including: The aim of this thesis is to investigate the root causes of these discrepancies and to improve the correlation between indoor Read more
-
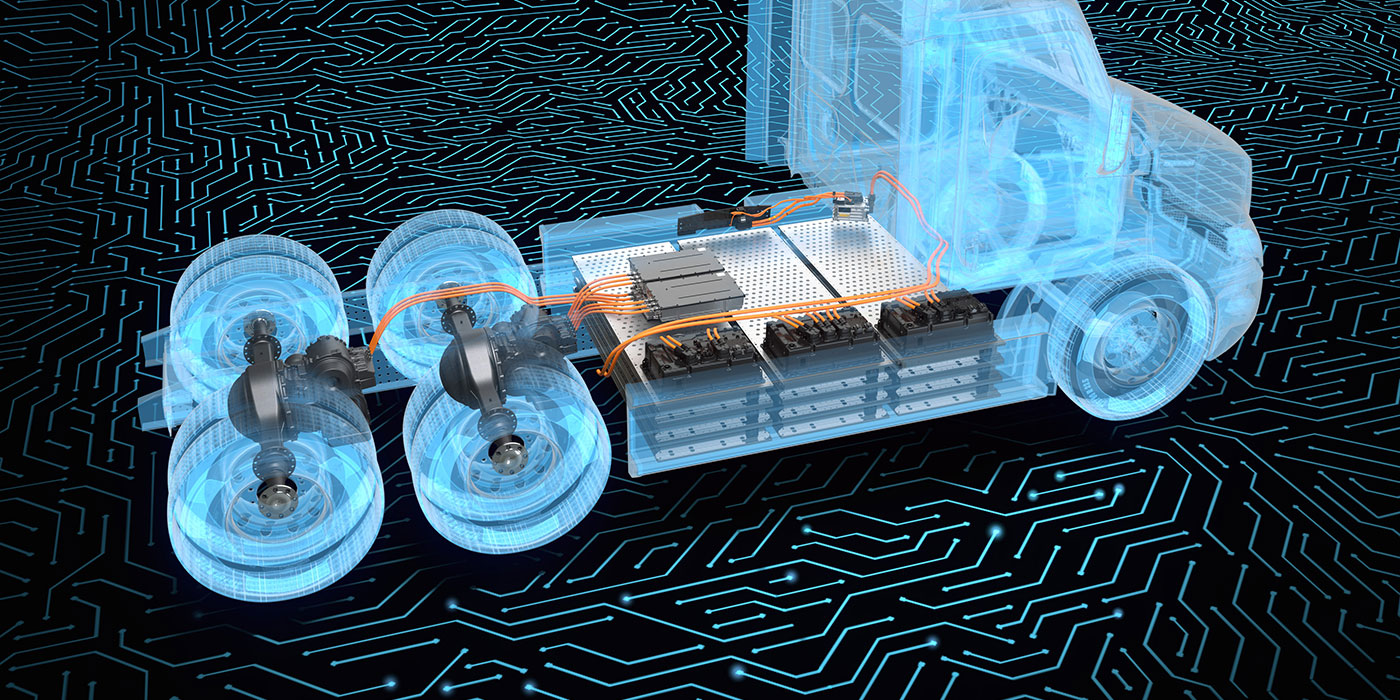
Modeling and control of hybrid powertrain for heavy duty vehicles
This thesis focuses on the modeling and control of hybrid powertrains for heavy-duty vehicles. A comprehensive dynamic model of the powertrain is developed, accounting for the interaction between the internal combustion engine, electric machines, energy storage system, and transmission. Control strategies for power split, energy management, and drivability optimization are investigated under representative operating conditions. Read more