Tag: EPFL
-
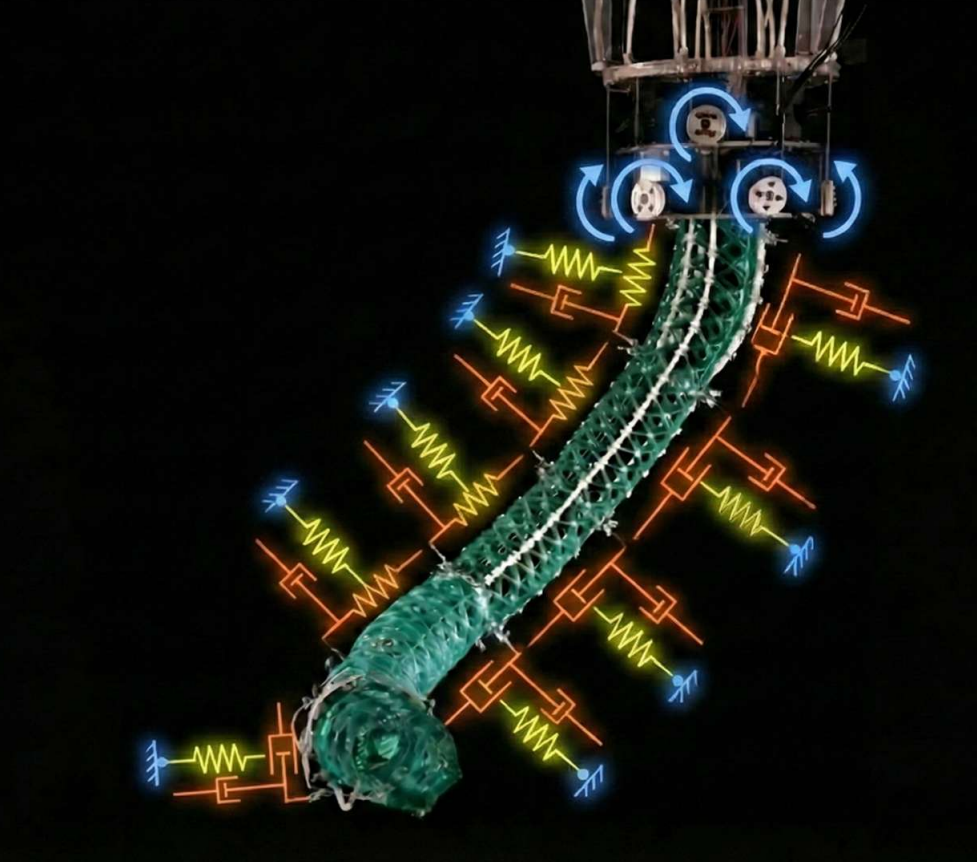
Virtual Model Control of a Soft Compliant Manipulator
Soft continuum robotic arms offer unparalleled dexterity and compliance over rigid bodies, thus facilitating safe and robust interactions with environments. These characteristics make them ideal for diverse applications, such as collaborative robotics or medical contexts. However, due to their virtually infinite degrees of freedom, control of these systems has always been a challenge. Various control