-

Optimal Control of Flow-Induced TRAPs Using Spinning Robots
This project combines optimal control, fluid mechanics, and dynamical systems to design and steer transport and accumulation regions (TRAPs) in fluid environments using spinning robots as flow actuators. By controlling rotation speed, direction, and robot coordination, we aim to generate tailored flow structures that selectively trap floating particles or swimming microorganisms. The theoretical component builds Read more
-
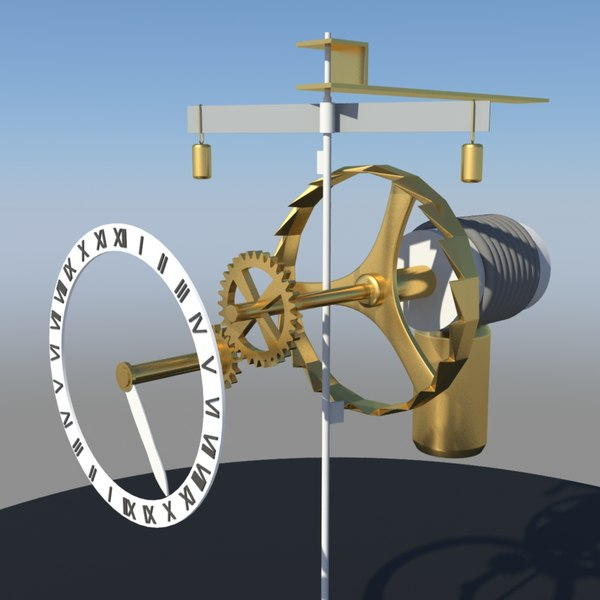
Multibody simulation of medieval mechanical clock
Background and MotivationThe verge-and-foliot escapement is among the earliest mechanical regulation mechanisms, yet its motion and timekeeping performance remain challenging to predict quantitatively because the device operates through intermittent contact between the crown wheel teeth and the pallets mounted on the verge. From an engineering standpoint, this makes the system highly sensitive to geometry, inertia Read more