Category: Road Vehicles
-
Magnet Optimization in High-Performance Electric Motors
This research focuses on reducing rare-earth magnet content in automotive electric motors while preserving torque density, efficiency, and overall performance. The thesis will explore alternative rotor topologies, flux concentration strategies, advanced control algorithms, and electromagnetic optimization through finite element analysis. Thermal and mechanical implications of magnet reduction will also be evaluated. The work will be…
-
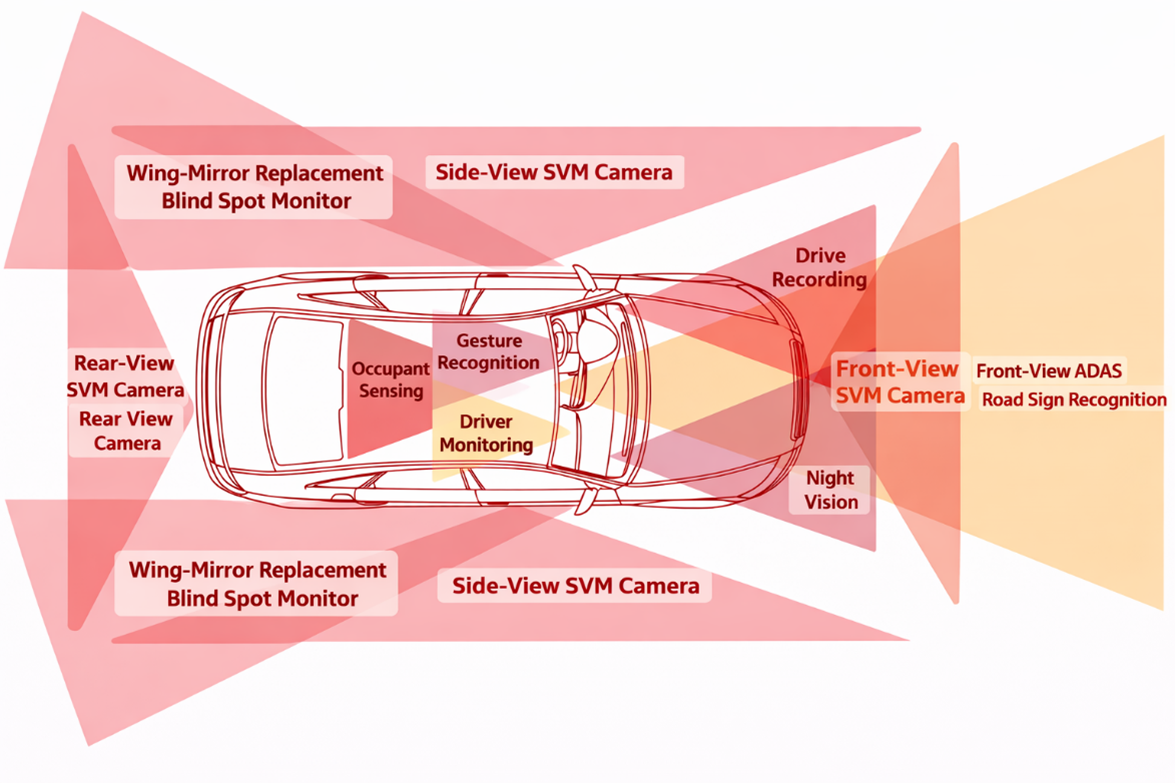
Secure Wireless Power and Data Transmission for ADAS Cameras
This thesis explores the feasibility of replacing wired connections to ADAS cameras with secure wireless transmission of both power and high-bandwidth data streams (including CAN and raw video). The research will investigate wireless power transfer technologies, electromagnetic compatibility, signal integrity, cybersecurity requirements, and functional safety compliance under automotive standards. System-level modelling will evaluate efficiency, reliability,…
-

Invisible Antenna Integration Architectures for ADAS Systems
The objective of this thesis is to investigate alternative antenna integration concepts that eliminate current windshield-mounted antennas located near ADAS cameras. The research will explore electromagnetic compatibility, signal propagation modelling, packaging constraints, and regulatory compliance aspects. The work will assess performance trade-offs between signal strength, sensor visibility, structural integration, and vehicle design requirements. Prototypes or…
-

Next-Generation Automotive Thermal Management Technologies
This thesis aims to systematically explore innovative alternatives to conventional automotive cooling systems. The thesis will include a structured state-of-the-art review of emerging thermal management technologies such as immersion cooling, two-phase cooling, and high-performance heat exchangers. The study will evaluate technological feasibility, thermal performance, scalability, packaging constraints, sustainability implications, and cost competitiveness. A comparative framework…
-
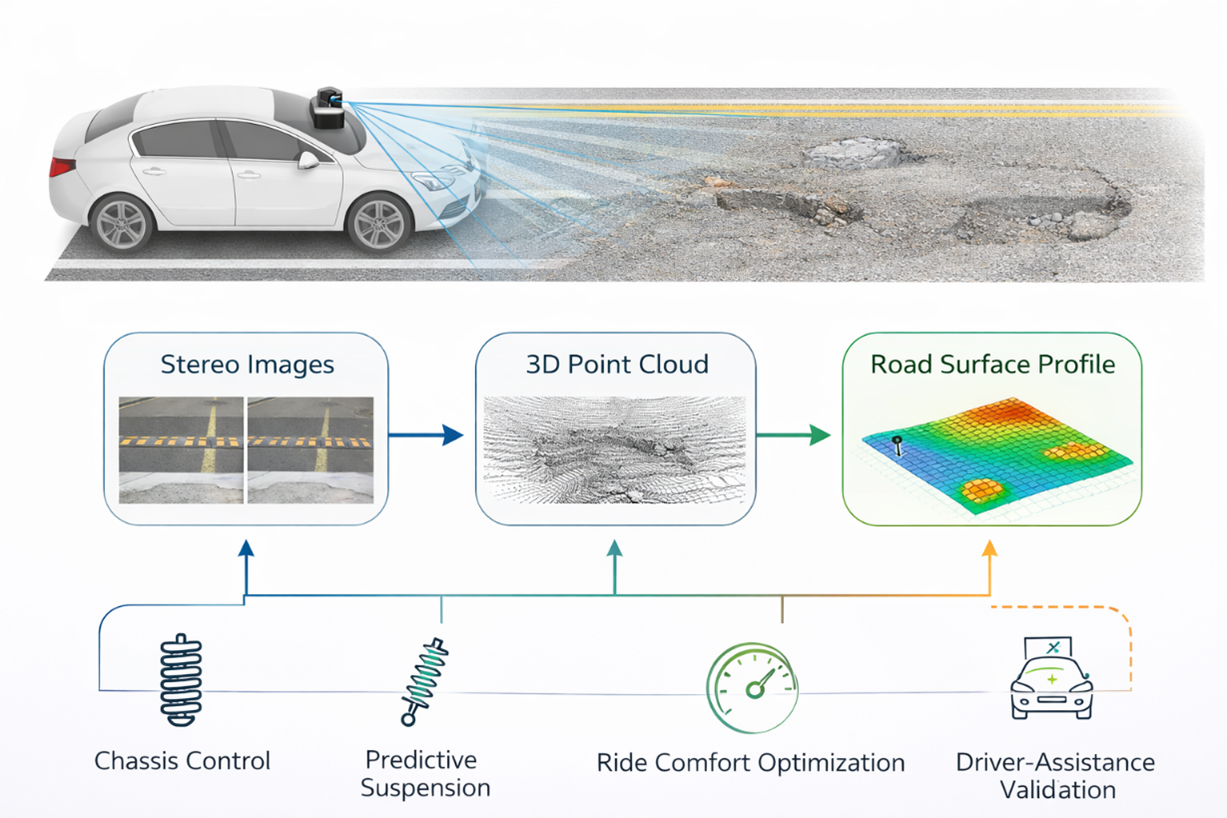
3D Point Cloud–Based Road Surface Profiling for Intelligent Vehicles
The purpose of this thesis is to design and train an algorithm capable of extracting detailed road surface profiles from 3D LiDAR point cloud data. The research will investigate advanced filtering techniques, surface reconstruction methods, and machine learning models to accurately detect road irregularities such as bumps, potholes, and uneven surfaces. The reconstructed road profile…
-

Predictive Fleet Intelligence for Battery Charge Optimization
This thesis aims to develop predictive models capable of anticipating customer driving and charging behaviour based on large-scale fleet telematics data. By leveraging machine learning techniques and statistical analysis, the research will extract meaningful patterns from historical usage data, including trip frequency, parking duration, charging cycles, environmental conditions, and driving styles. The objective is to…
-

Severity-Guided Adaptive Sensor Fusion: A Dynamic Weighting Framework for Resilient Autonomous Navigation under Sensor Failures
Introduction Reliable operation of Autonomous Vehicles relies heavily on multi-modal sensor fusion (combining Camera, LiDAR, and Radar) to compensate for individual sensor weaknesses. However, standard deep learning fusion architectures typically operate under the assumption of nominal sensor health. Consequently, they lack a fail-safe mechanism to handle corrupted data streams caused by environmental degradation (e.g., severe…
-

4DRadar-Guided Generative Inpainting: Robust LiDAR Restoration via Latent Diffusion Models under Sensor Failures and Adverse Weather
Introduction LiDAR sensors are the backbone of precise 3D perception in autonomous vehicles, but they suffer from significant degradation in adverse weather (scattering in fog/rain) and are prone to hardware failures. While traditional filtering removes noise, it leaves geometric gaps that can blind downstream detectors. Conversely, 4D Imaging Radar is resilient to weather but lacks…
-

Mamba-Driven Robust Navigation: Efficient Long-Sequence State Space Models for 4D Radar and Multi-Modal SLAM
Introduction Reliable Simultaneous Localization and Mapping (SLAM) in adverse weather remains a significant challenge for autonomous driving. While LiDAR sensors offer high geometric precision, they are prone to signal degradation in rain, fog, and snow. Conversely, 4D Imaging Radar provides superior resilience and dynamic Doppler information but suffers from inherent sparsity, multipath noise, and lower…
-
Lateral Dynamics and Stability Analysis of Electric Scooters
The rapid diffusion of electric scooters as a means of urban transportation has raised significant concerns regarding their dynamic stability and rider safety, particularly in lateral maneuvers such as cornering, obstacle avoidance, and low-speed balancing. Despite their widespread use, the lateral dynamics of electric scooters remain less investigated than those of motorcycles or bicycles, especially…