-
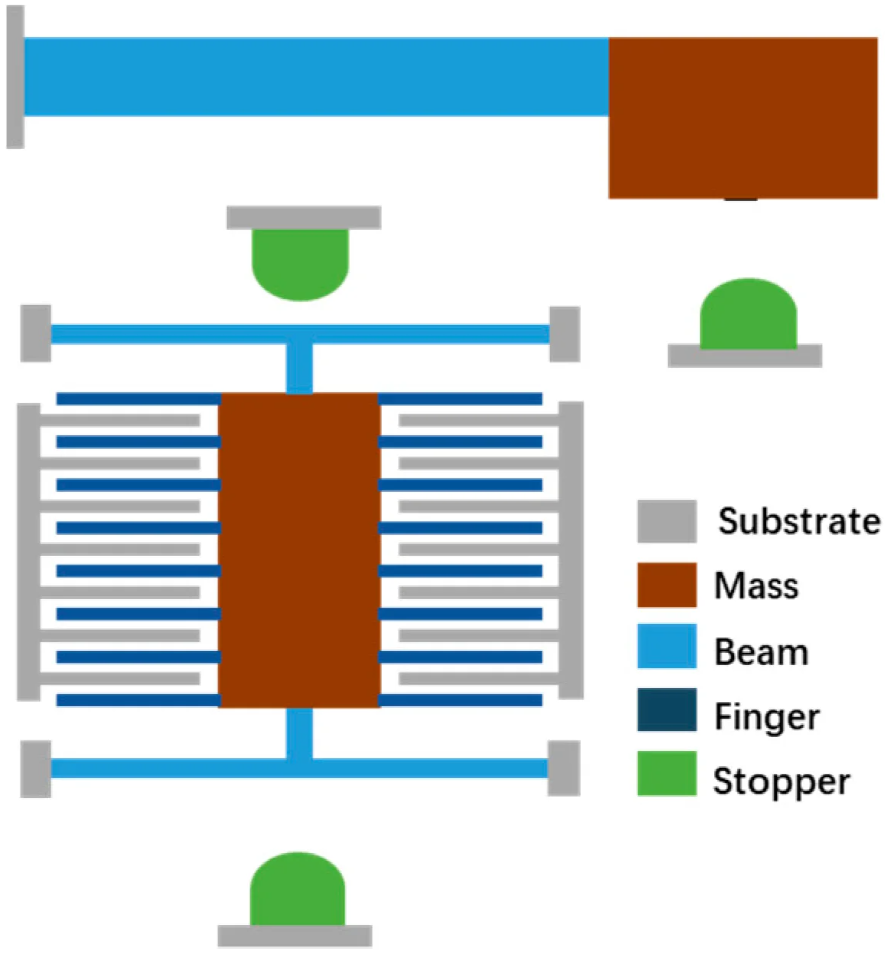
Mechanical nonlinearities (Geometric or Contact) in inertial MEMS sensors
Mechanical nonlinearities play an important role in inertial MEMS sensors and cannot be avoided. The trend to push the performance to the limits caused second-order nonlinear effects to become a critical phenomenon that must be considered: these effects are already visible and characterized on mass production devices. External shocks and vibrations could also induce other Read more
-
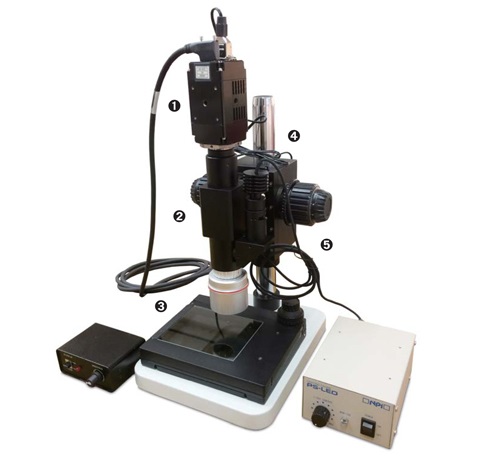
Out-of-plane stroboscopic analysis of MEMS motion sensors
Goal: implement a system for optical stroboscopic analysis of TDK’s MEMS accelerometers and gyroscopes, aimed at the characterization of out-of-plane resonant modes in those devices Strategy: enhance TDK’s existing system for in-plane stroboscopic optical analysis, based on the usage of infrared microscope and synchronously controlled light source, to add the out-of-plane capability. Work phases Estimated Read more
-
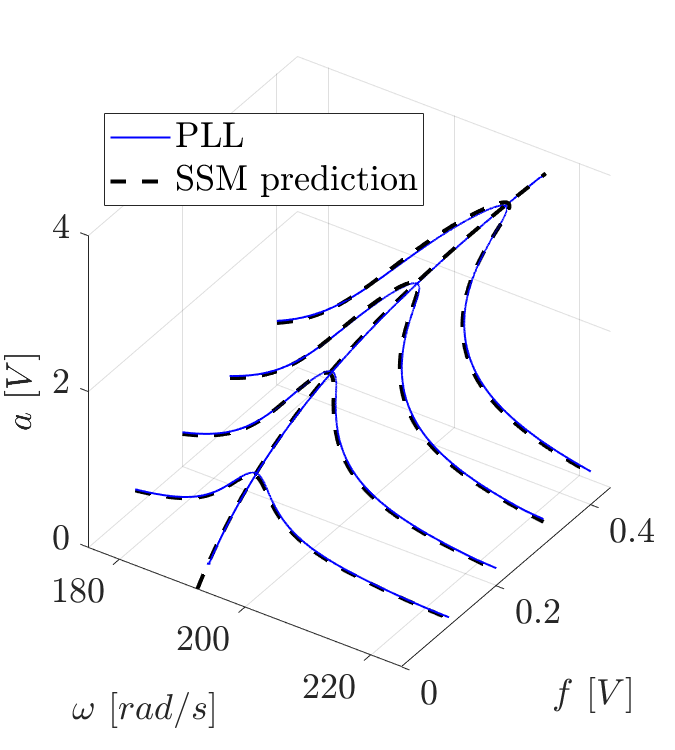
SSM-enhanced Control-Based Continuation (CBC)
In this project we aim to experimentally determine the backbone and the frequency response of a system using Control Based Continuation. CBC consists, loosely speaking, in creating a phase controller (PLL, Phase-Locked Loop) to lock a system at resonance (90°) and then extract the backbone by increasing the forcing with continuation algorithms, typical of numerical Read more
-
Contact dynamics in inertial MEMS sensors
Nowadays, mechanical robustness is a key spec for inertial MEMS sensors. The contacts occurring in silicon structures are a relevant problem that may generate dangerous particles or even cause the breakage of the MEMS sensor. Despite these critical phenomena impacting the sensor’s manufacturing and lifetime functionality, the modeling approaches currently adopted are too simplified. The Read more
-
Adjoint formulation for backbone curve computation at arbitrary order
We have recently proposed a method to tailor the nonlinear response of a structure using Spectral Submanifolds (SSM, or Lyapunov Subcenter Manifolds – LSM) and an optimization procedure1. By defining a set of frequency-amplitude pairs we can fit the backbone curve of the system to these points. The computation of the sensitivities of the LSM, Read more