Tag: reinforcement learning
-

Fall Recovery for Humanoid Robots
Introduction Humanoid robots are designed to operate in human-centered environments, where unexpected contacts, uneven terrain, and external disturbances frequently lead to loss of balance and falls. Reliable fall recovery is therefore a key capability for long-term autonomous operation and human–robot coexistence. Classical approaches rely on carefully engineered whole-body controllers and pre-defined get-up sequences, which are
-

Quadruped Teleoperation System
Introduction Reinforcement Learning (RL) has recently enabled agile and dynamic behaviors in legged robots. However, RL alone is not always the most suitable tool, especially for sparse, long-horizon tasks that involve complex object manipulation. Even with careful problem formulation, reward design, and curriculum learning, such tasks can remain difficult to solve using standard RL methods.
-
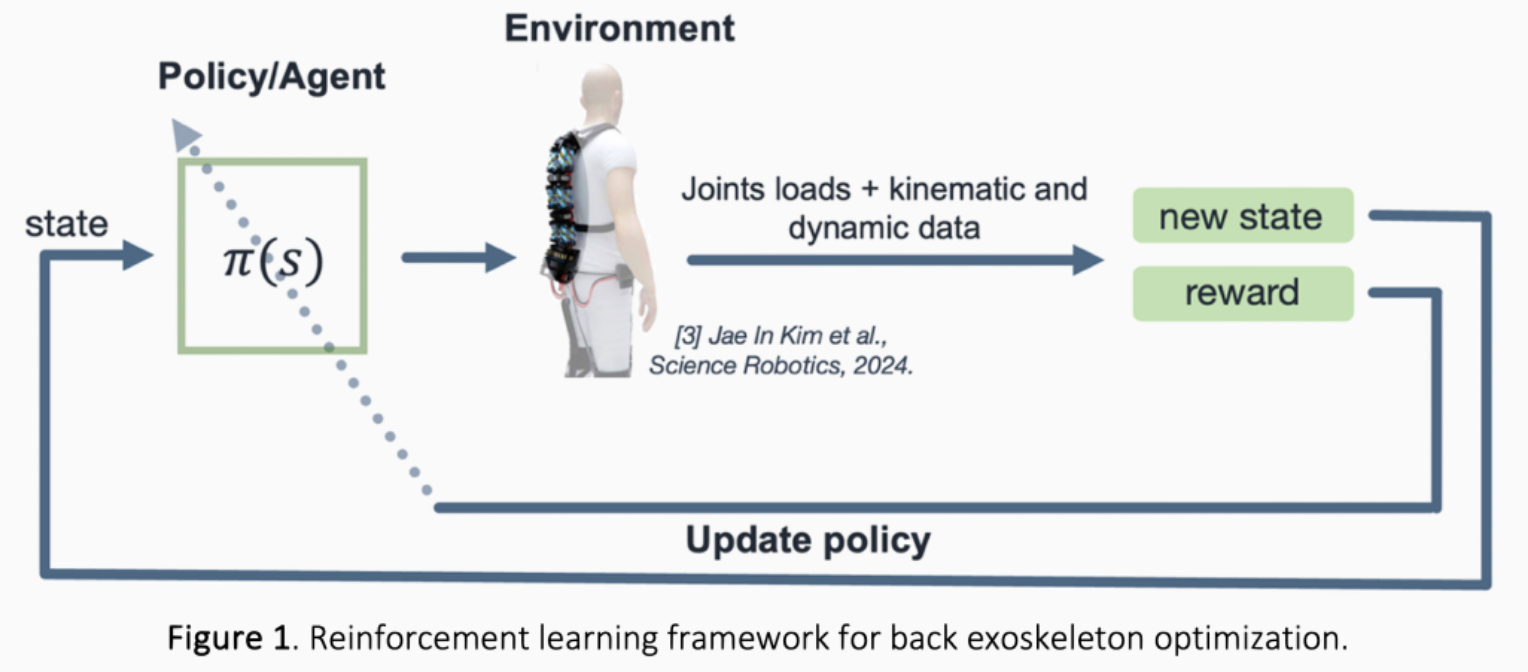
Refinement and Optimization of an Existing Reinforcement Learning Framework for Back Exoskeleton Control
Contacts: Marta Gandolla, Andrea Dal Prete Location: Politecnico di Milano (Bovisa Campus) Motivation of the study. Back exoskeletons are increasingly studied to reduce spinal loads and muscular effort in physically demanding tasks, with both rigid and soft designs showing promising results. However, widespread adoption is limited by the challenge of developing controllers that can adapt to different
-

Agents for Competitive Multi-Agent Autonomous Vehicle Racing: Learning-based vs Model-base
High-speed, multi-agent autonomous vehicle racing demands agents that can make split-second decisions while strategically interacting with unpredictable opponents. This thesis will develop a learning-based racing agent and a model-based one both capable of long-term reasoning, balancing raw speed with tactical maneuvers, and benchmark their performance under head-to-head competition. Requirements and tools Contacts: Michael Khayyat, Stefano