Tag: Localization
-
Dataset-Driven Robust Ego Localization for Autonomous Vehicles in Challenging Sensing Conditions
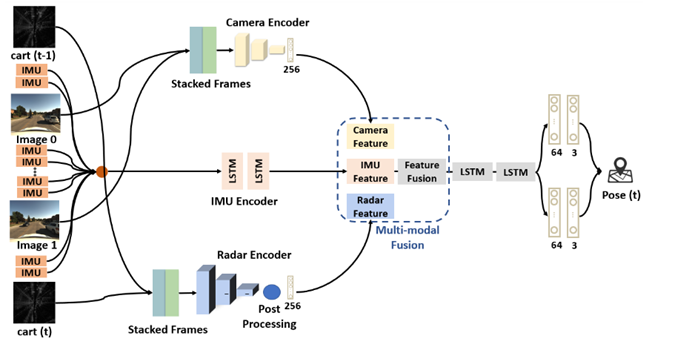
Introduction Robust ego-vehicle localization is a core requirement for autonomous driving. In real-world operation, performance can degrade due to adverse weather and non-ideal sensor behavior, such as dropouts, partial failures, miscalibration, or temporal misalignment. This thesis topic focuses on dataset-driven, learning-based approaches to improve localization robustness in multi-sensor settings, with systematic experimental evaluation. Goals This