Contacts: Marta Gandolla, Andrea Dal Prete
Location: Politecnico di Milano (Bovisa Campus)
Motivation of the study. Back exoskeletons are increasingly studied to reduce spinal loads and muscular effort in physically demanding tasks, with both rigid and soft designs showing promising results. However, widespread adoption is limited by the challenge of developing controllers that can adapt to different users and tasks. Traditional controllers ensure stability but lack flexibility, motivating the use of reinforcement learning (RL), which allows policies to be learned through interaction and has shown success in robotics and human-interactive systems. A major challenge is the computational burden of training RL agents in high-dimensional, safety-critical human–exoskeleton settings. Surrogate models can approximate biomechanical simulations, accelerating training while reducing reliance on invasive measurements, offering new possibilities for adaptive and scalable exoskeleton control.
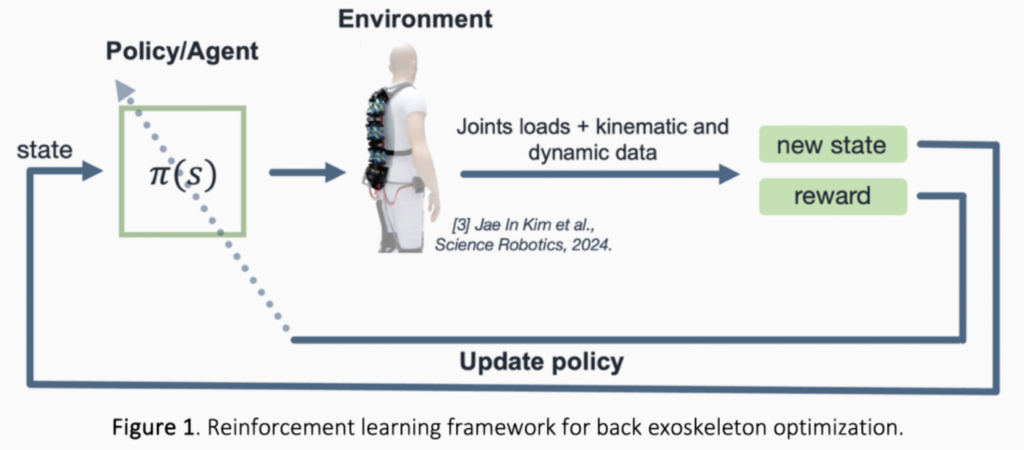
Objective. The candidate will refine and optimize an existing reinforcement learning framework for back exoskeleton control (shown in Figure 1). The work involves reviewing relevant literature, systematically analyzing and optimizing each module—including neural networks for biomechanical estimation, physics-based models, and RL policy/value components—and performing a global integration and optimization. The ultimate goal is to develop robust and efficient control policies that adapt across users and tasks, reducing spinal loads and enhancing intelligent, health-oriented exoskeleton assistance.
Things to know (if you agree to start the thesis):
- Thesis duration is approximately 6-9 months. You’ll be required to respect the timeline at the best of your possibilities.
- We will share codes through GitHub to continuously share and keep correct versioning for the code.
- You will need to write the thesis using Overleaf (template shared by the supervisor).
- You will need to accept the invitation to the shared folder by the supervisor and place there all ORDERED material of the thesis (e.g., relevant literature, relevant code, relevant data, etc.). This folder will be your Delivery pack before graduation.
- You will be included in the biomecc team meetings [and Ali’s group meetings?] where we discuss experimental protocols and ongoing projects with the lab team.
- Although the thesis will be primarily conducted in simulation environments, periodic meetings will be scheduled for updates and in-person presentations.