Category: Road Vehicles
-
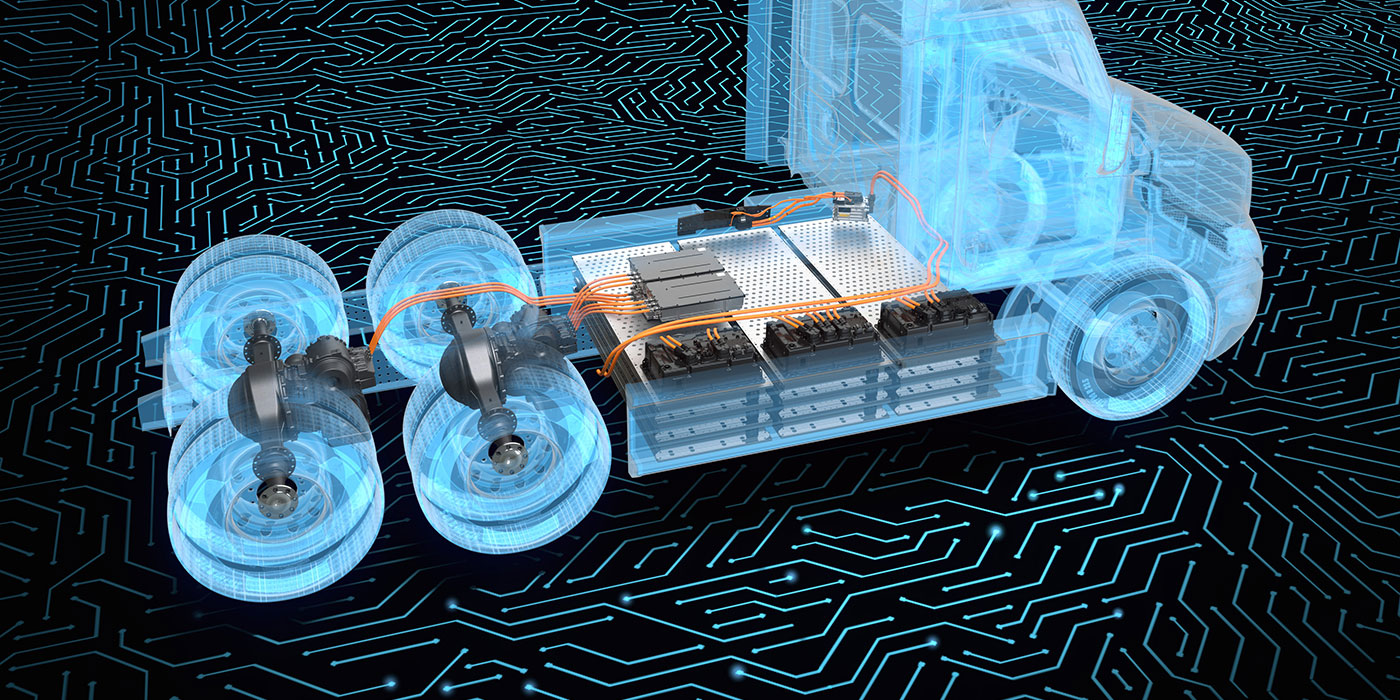
Modeling and control of hybrid powertrain for heavy duty vehicles
This thesis focuses on the modeling and control of hybrid powertrains for heavy-duty vehicles. A comprehensive dynamic model of the powertrain is developed, accounting for the interaction between the internal combustion engine, electric machines, energy storage system, and transmission. Control strategies for power split, energy management, and drivability optimization are investigated under representative operating conditions.
-
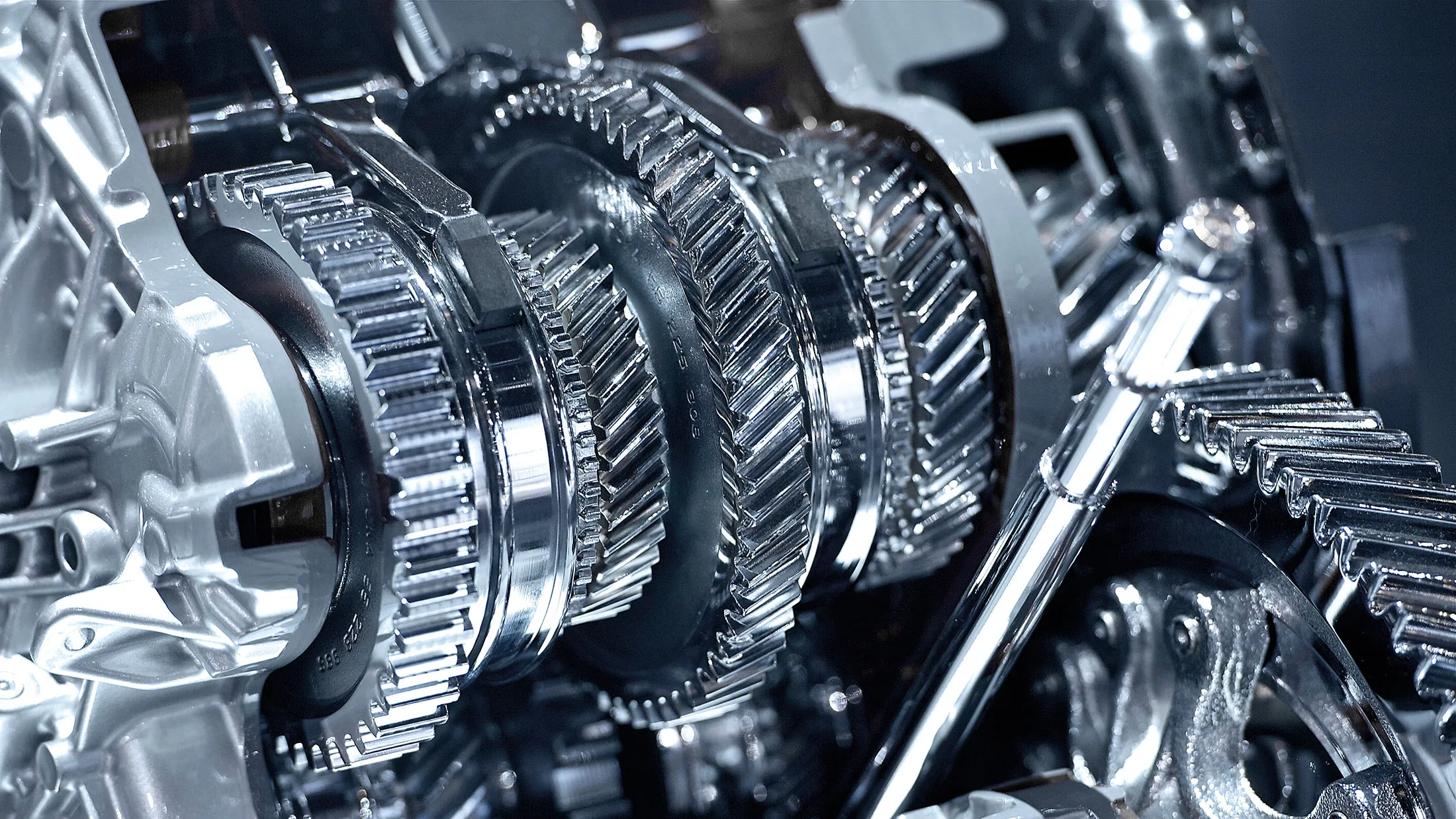
Non-linear analysis of powertrain torsional vibration accounting for backlash
This thesis investigates the non-linear torsional vibration behavior of automotive powertrains, explicitly accounting for backlash effects in transmission components. A lumped-parameter dynamic model is developed to represent dead-zone non-linearities, intermittent contact, and impact phenomena. Time- and frequency-domain analyses are performed to study the influence of operating conditions, torque excitation, and system parameters on the dynamic
-

Optimality assessment of an NMPC-based GLOSA system
Introduction The assessment of solution optimality is a crucial aspect in the design of real-time control strategies for intelligent transportation systems. In the context of Green Light Optimal Speed Advisory (GLOSA), Nonlinear Model Predictive Control (NMPC) is widely adopted due to its ability to handle system constraints and nonlinear vehicle dynamics while operating in real
-

Development of a centralized eco-driving system
Introduction Centralized eco-driving systems exploit vehicle-to-infrastructure (V2I) communication to coordinate vehicle speed profiles based on traffic signal and network information. By enabling predictive and cooperative driving, it reduces energy consumption, emissions, and travel time, while improving traffic flow efficiency and driving comfort. Goals This thesis proposes the development of a smart traffic light control system
-

Manual-Driving Data Acquisition System for Dataset Creation in Unstructured Private Areas with VRU Interaction
Introduction High-quality datasets are a key enabler for data-driven methods in autonomous driving and mobile robotics. This is particularly true in unstructured environments and private areas (e.g., campuses, industrial sites, private roads), where vehicle behavior and interactions can differ substantially from public-road scenarios. In these contexts, collecting representative data of vehicle operation and VRU (Vulnerable
-

Industry-Driven Topics in AV Software, Teleoperation and Fleet Management with Tecnocad Group
Introduction This thesis “umbrella” is developed in interaction with Tecnocad Group, an Italian engineering company operating across mobility sectors and providing end-to-end engineering development from concept to production.Tecnocad Group delivered a guest presentation within the course, outlining several industry-relevant directions that can be shaped into a thesis topic depending on the interests and technical profile
-

ADS Safety, Monitoring and Reporting Topics in collaboration with JRC (Ispra)
Introduction The Joint Research Centre (JRC) is the European Commission’s science and knowledge service, providing independent scientific advice and evidence to support EU policymaking. JRC in Ispra (Italy), is one of the European Commission’s major research campuses.This thesis “umbrella” collects potential topics inspired by those lectures, with a focus on safety-oriented analysis for Automated Driving
-
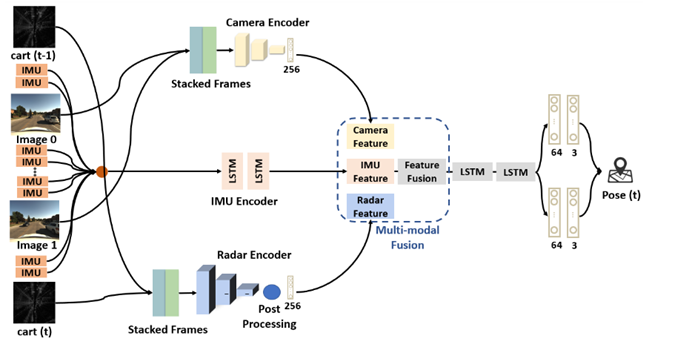
Dataset-Driven Robust Ego Localization for Autonomous Vehicles in Challenging Sensing Conditions
Introduction Robust ego-vehicle localization is a core requirement for autonomous driving. In real-world operation, performance can degrade due to adverse weather and non-ideal sensor behavior, such as dropouts, partial failures, miscalibration, or temporal misalignment. This thesis topic focuses on dataset-driven, learning-based approaches to improve localization robustness in multi-sensor settings, with systematic experimental evaluation. Goals This
-

Agents for Competitive Multi-Agent Autonomous Vehicle Racing: Learning-based vs Model-base
High-speed, multi-agent autonomous vehicle racing demands agents that can make split-second decisions while strategically interacting with unpredictable opponents. This thesis will develop a learning-based racing agent and a model-based one both capable of long-term reasoning, balancing raw speed with tactical maneuvers, and benchmark their performance under head-to-head competition. Requirements and tools Contacts: Michael Khayyat, Stefano