Author: Andrea Dal Prete
-

Systematic Validation and Expansion of Thermal Imaging Algorithms for Muscular Activity and Fatigue Monitoring
Contacts: Marta Gandolla, Andrea Dal Prete Location: Politecnico di Milano (Bovisa Campus) Motivation of the study: Monitoring muscle activation and fatigue is crucial for optimizing physical performance and preventing work-related musculoskeletal disorders, particularly in industrial environments where back-support exoskeletons are increasingly used. While Surface Electromyography (SEMG) is the traditional gold standard, it suffers from limitations such as
-

Comparing Modern AI-Powered 3D Reconstruction Pipelines with Traditional Human Motion Capture Systems
Contacts: Marta Gandolla, Andrea Dal Prete Location: Politecnico di Milano (Bovisa Campus) Motivation of the study: Accurate human kinematics measurement is fundamental in biomechanics, ergonomics, and human–robot interaction, yet traditional approaches remain limited. Optical motion capture systems deliver high accuracy but require expensive equipment and controlled laboratory conditions, while IMU-based methods offer portability at the cost of
-
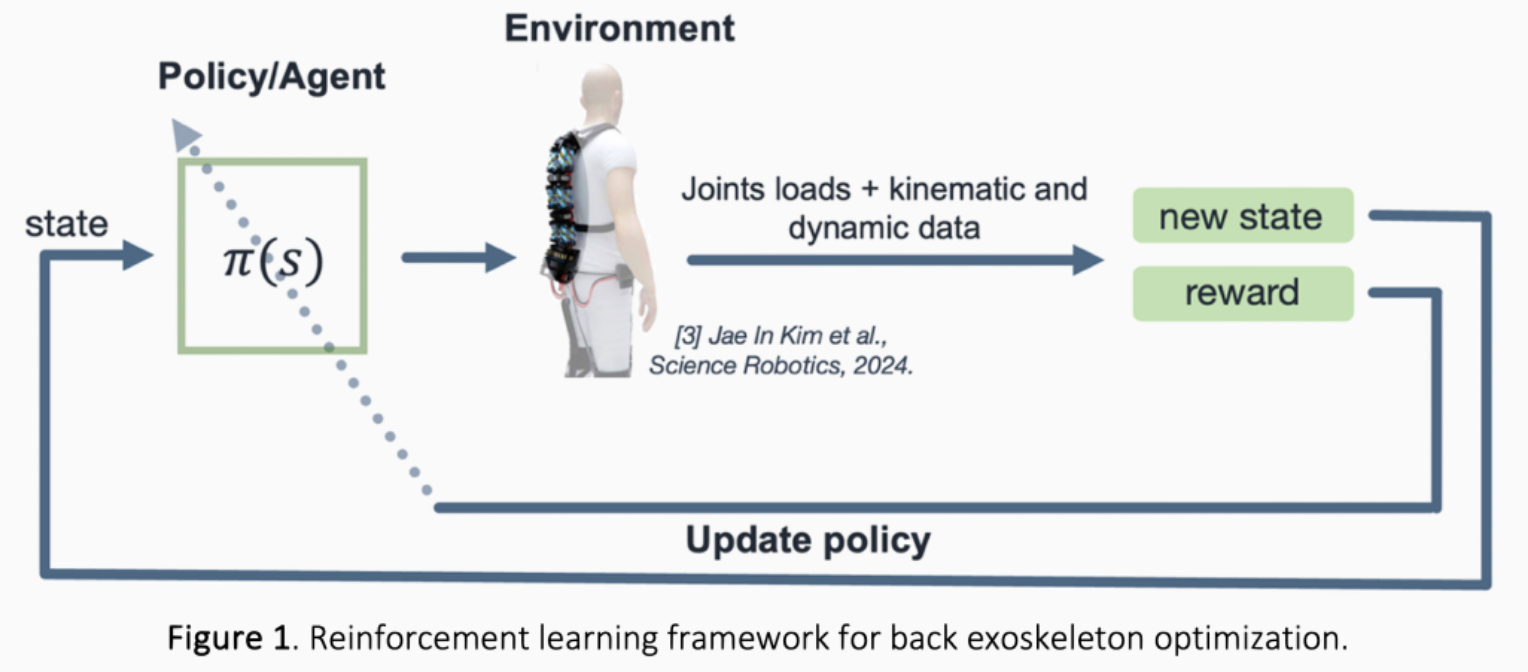
Refinement and Optimization of an Existing Reinforcement Learning Framework for Back Exoskeleton Control
Contacts: Marta Gandolla, Andrea Dal Prete Location: Politecnico di Milano (Bovisa Campus) Motivation of the study. Back exoskeletons are increasingly studied to reduce spinal loads and muscular effort in physically demanding tasks, with both rigid and soft designs showing promising results. However, widespread adoption is limited by the challenge of developing controllers that can adapt to different
-
Real-Time Estimation of Arm Impedance and Variable Admittance Control for Elbow Exosuit
Contacts: Marta Gandolla, Andrea Dal Prete, Ali KhalilianMotamed Bonab Location: Politecnico di Milano (Bovisa Campus) – Scuola Sant’Anna di Pisa Motivation of the study. This thesis, developed within a collaboration between Politecnico di Milano and Scuola Superiore Sant’Anna, focuses on adaptive control strategies for a hybrid soft–rigid elbow exosuit. The project aims to estimate user biomechanical impedance
-
Design of a Hybrid Rigid-Soft Cable-Driven Back Exoskeleton
Contacts: Marta Gandolla, Andrea Dal Prete, Ali KhalilianMotamed Bonab Location: Politecnico di Milano (Bovisa Campus) – Scuola Sant’Anna di Pisa Motivation of the study. Musculoskeletal disorders are a major concern in jobs involving repetitive lifting, as they increase spinal loading, fatigue, and the risk of back injuries. Back support exoskeletons (BEs) aim to reduce these