Soft continuum robotic arms offer unparalleled dexterity and compliance over rigid bodies, thus facilitating safe and robust interactions with environments. These characteristics make them ideal for diverse applications, such as collaborative robotics or medical contexts. However, due to their virtually infinite degrees of freedom, control of these systems has always been a challenge. Various control strategies have emerged, ranging from kinematic controllers to data-driven methods. However, most approaches disregard the inherent compliance of the robot. They impose artificial rigidity on the system, eventually negating the structural flexibility that constitutes its primary advantage. As the main intelligence of the robot is naturally embodied, the control architecture must align with the system’s nature. Therefore, we propose a compliant control framework that eliminates rigidity assumptions, treating the soft robot as a medium for environmental interaction.
Virtual Model Control (VMC) offers a novel framework for addressing these requirements, and it has already been applied to legged locomotion and rigid manipulation. VMC involves superimposing a virtual mechanical system onto the physical hardware to generate control forces. Instead of rigidly dictating position, this approach acts as a flexible guidance mechanism giving the robot suggestions rather than commands. This ensures inherent stability and allows for intuitive adaptation across diverse interaction tasks.
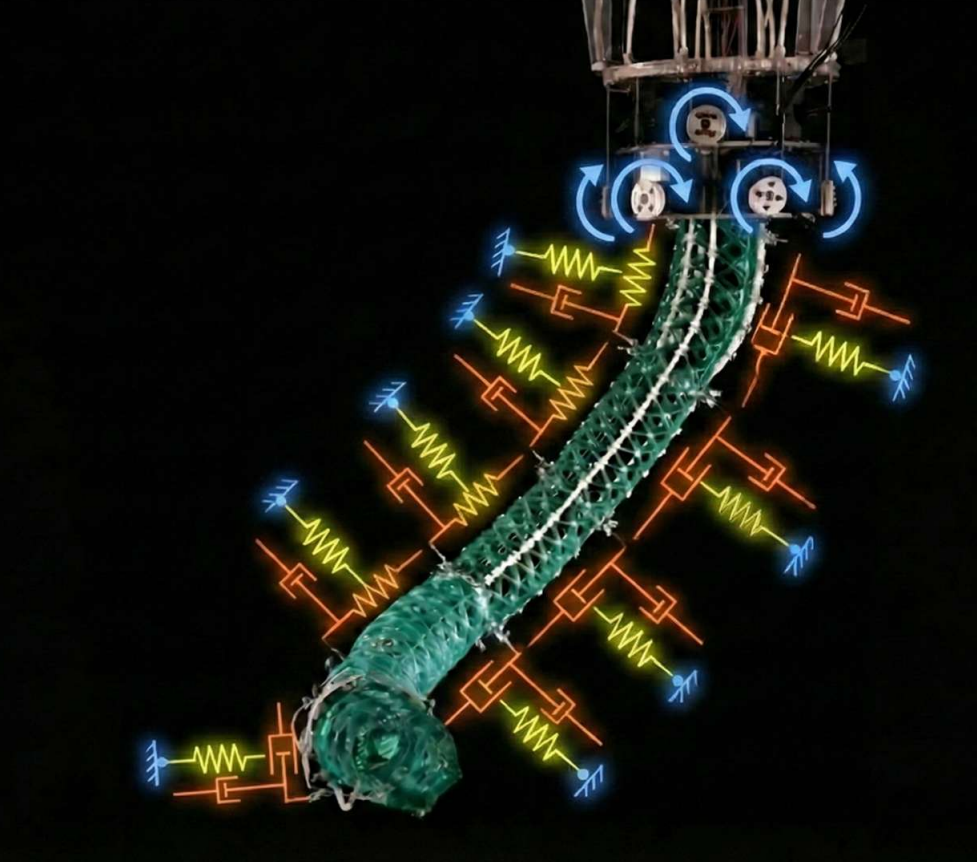
In this project, we will implement this model-based strategy for force control of a continuum manipulator. The cable-driven soft robotic arm comprises three independent modules, and each module is actuated independently with three cables. We will first derive a Piecewise Constant Curvature (PCC) kinematic model based on motor encoder feedback. Subsequently, we will design tailored Virtual Models that apply virtual forces to the robot’s central axis. Validation will focus on the robot’s ability to achieve target goals while maintaining compliant interaction with external obstacles. Finally, the project will explore data-driven optimization (online or offline) to adaptively tune model parameters for enhanced performance.
Requirements
- Highly motivated for the topic
- Programming experience (Python, MATLAB)
- Knowledge of robotics and control theory
- Familiarity with ROS is a plus
- Practical experience in robotics applications is a plus
- Strong interest in academic research is a plus
Workload
20% Literature review, 40% Software development, 40% Real world robot deployment
Main References
- Chen, Guangrong, et al., Virtual model control for quadruped robots, IEEE Access 8 (2020): 140736-140751.
- Zhang, Yi, et al., Virtual model control for compliant reaching under uncertainties, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024.
- Pratt, Jerry, Peter Dilworth, and Gill Pratt., Virtual model control of a bipedal walking robot, Proceedings of international conference on robotics and automation. Vol. 1. IEEE, 1997.
- Della Santina, Cosimo, et al., Dynamic control of soft robots interacting with the environment, 2018 IEEE International Conference on Soft Robotics (RoboSoft). IEEE, 2018.
- Guan, Qinghua, et al., Trimmed helicoids: an architectured soft structure yielding soft robots with high precision, large workspace, and compliant interactions, npj Robotics 1.1 (2023): 4.
Contacts
Lorenzo Vignoli, lorenzo.vignoli@epfl.ch, EPFL
To apply, please include:
- A short motivation letter regarding this project
- A copy of your CV and academic transcripts