Tag: Robotics
-
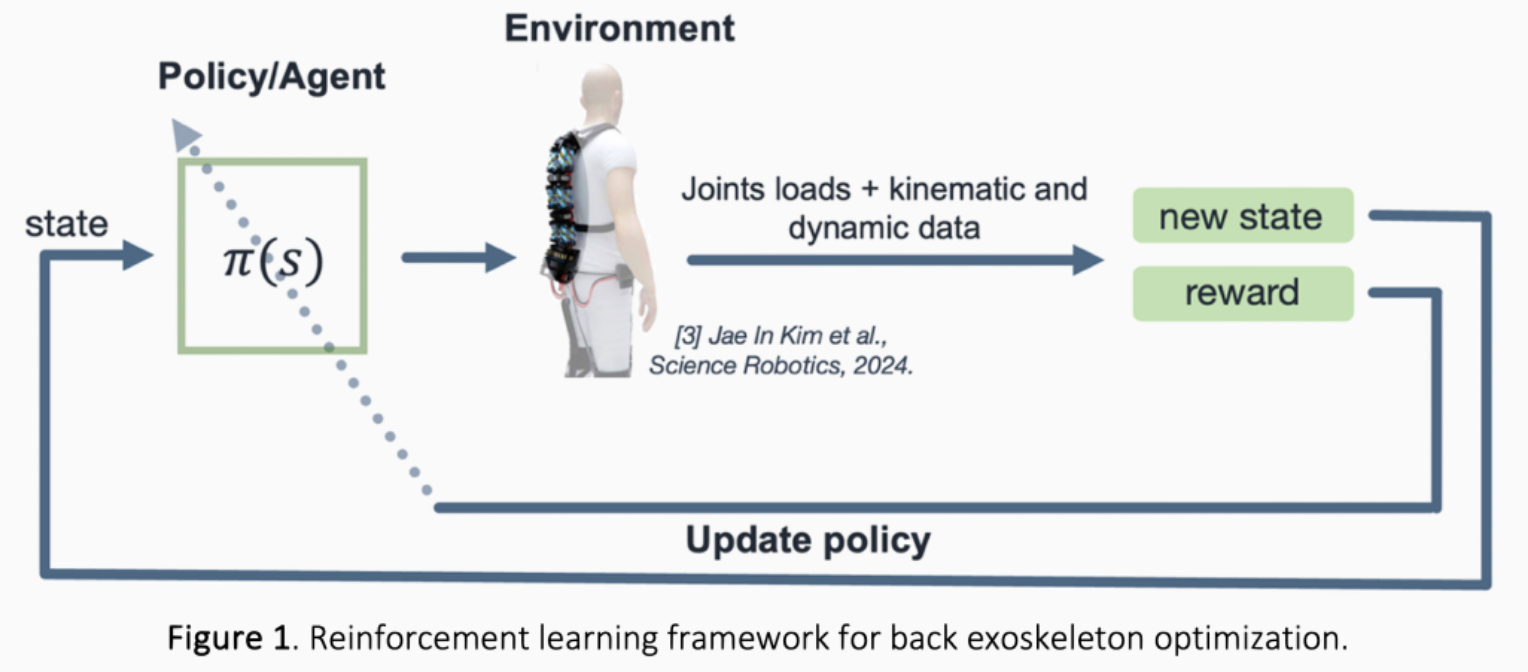
Refinement and Optimization of an Existing Reinforcement Learning Framework for Back Exoskeleton Control
Contacts: Marta Gandolla, Andrea Dal Prete Location: Politecnico di Milano (Bovisa Campus) Motivation of the study. Back exoskeletons are increasingly studied to reduce spinal loads and muscular effort in physically demanding tasks, with both rigid and soft designs showing promising results. However, widespread adoption is limited by the challenge of developing controllers that can adapt to different
-
Real-Time Estimation of Arm Impedance and Variable Admittance Control for Elbow Exosuit
Contacts: Marta Gandolla, Andrea Dal Prete, Ali KhalilianMotamed Bonab Location: Politecnico di Milano (Bovisa Campus) – Scuola Sant’Anna di Pisa Motivation of the study. This thesis, developed within a collaboration between Politecnico di Milano and Scuola Superiore Sant’Anna, focuses on adaptive control strategies for a hybrid soft–rigid elbow exosuit. The project aims to estimate user biomechanical impedance
-
Design of a Hybrid Rigid-Soft Cable-Driven Back Exoskeleton
Contacts: Marta Gandolla, Andrea Dal Prete, Ali KhalilianMotamed Bonab Location: Politecnico di Milano (Bovisa Campus) – Scuola Sant’Anna di Pisa Motivation of the study. Musculoskeletal disorders are a major concern in jobs involving repetitive lifting, as they increase spinal loading, fatigue, and the risk of back injuries. Back support exoskeletons (BEs) aim to reduce these
-
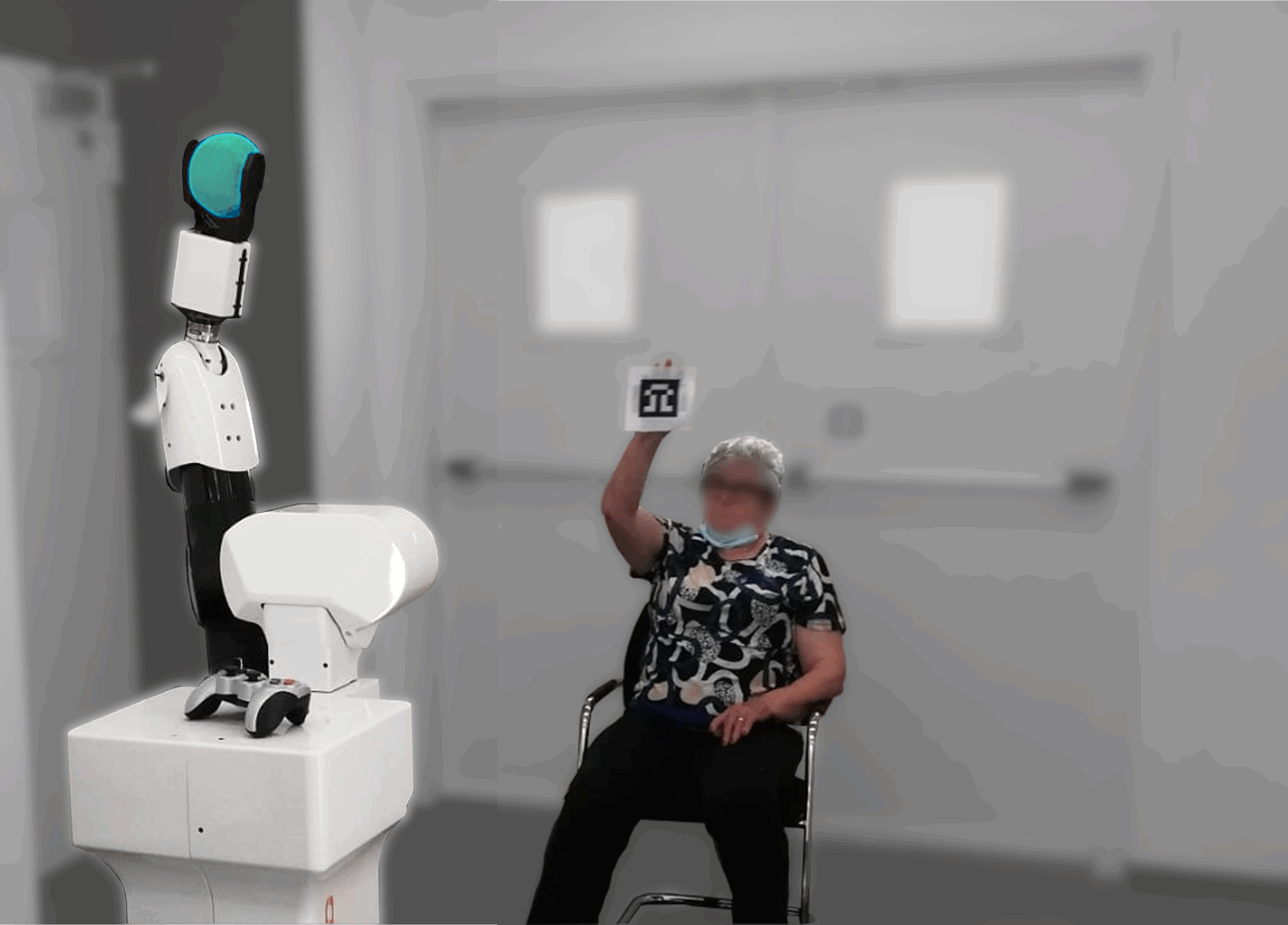
Enhancing Human-Robot Interaction in motor-cognitive game for older adults
As the aging population continues to grow, service robots are emerging as valuable tools to promote active and healthy aging. Previous work at the WE-COBOT Lab developed a motor-cognitive game for the TIAGo robot (PAL Robotics), combining physical and memory training through embodied interaction [Pozzi, Gandolla, Braghin, Robot-Mediated Gesture-Based Memory Game for Older Adult Psychophysical Stimulation.
-
A robotic walking assistant for older adults in long-term care
Assistance and monitoring during elders’ daily walk is something that stakeholders expect from an assistive robot. Though cart-like walkers represent a possible solution, they are limited in versatility. Contrarily, a humanoid walking assistant has the potentiality to accomplish many other tasks and to engage in social interactions, extending the caregivers’ activity. The student will develop
-

Control of an aquatic snake robot inspired by lampreys’ Central Pattern Generator
Aquatic robots inspired by snakes or eels can move with extreme agility and maneuverability, and are able to swim through narrow spaces and confined environments, opening the possibility to use these robots for environmental monitoring, search and rescue or infrastructure inspection. This robot is composed of nine modules that move generating a wave traveling from
-
Design and testing of an SMA-actuated fin for bioinspired soft robots
The thesis consists of designing a fin inspired by the cownose ray, entirely made of silicone rubber, without any rigid mechanism inside, and actuated by SMA (Shape Memory Alloy) coils. The lack of rigid elements inside the fin helps reproduce better the natural movement of these fishes, and arranging the coils in pairs, they work
-
Study of the propulsive performance of fins
The most common propulsive strategy of fishes and cetaceans is the Body-Caudal fin movement in which the animal undulates or oscillates its body, pushing backward the surrounding water. Most of the thrust is generated by the movement of the caudal fin, and every fish has a peculiar fin shape with a particular motion law, which