To ensure the safety of the railway network, track geometry is periodically inspected by Track Recording Vehicles (TRVs), which are special purpose vehicles typically equipped with inertial and optical sensors. Given their high operating costs, new strategies have been proposed in the latest years to support the condition monitoring of railway infrastructure, relying on instrumented in-service vehicles. To this aim, model-based strategies can be followed solving an inverse problem.
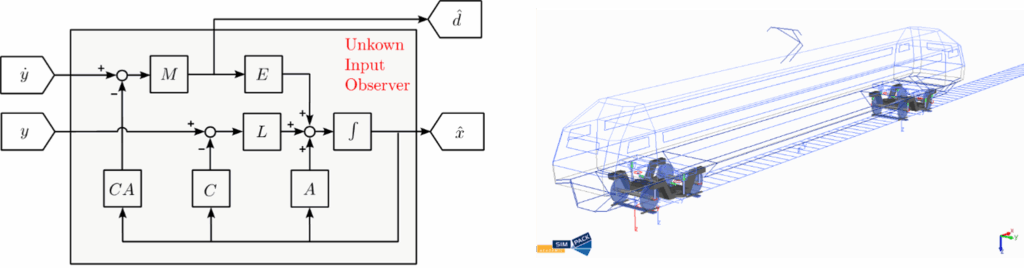
In recent years, a model-based solution for the identification of the vertical railway track irregularity has been successfully developed, relying on the Unknown Input Observer algorithm. In this thesis, the methodology will be extended to allow the identification of other components of the track irregularity, with specific attention to lateral alignment. At first, simulation data will be used adopting a railway vehicle model to generate the accelerations that the sensors (installed for instance on the bogies and carbody) would measure during operation. Secondly, the possibility of relying on experimental data will be explored too.
Contacts: Ivano La Paglia (ivano.lapaglia@polimi.it); Egidio Di Gialleonardo (egidio.digialleonardo@polimi.it); Alan Facchinetti (alan.facchinetti@polimi.it)