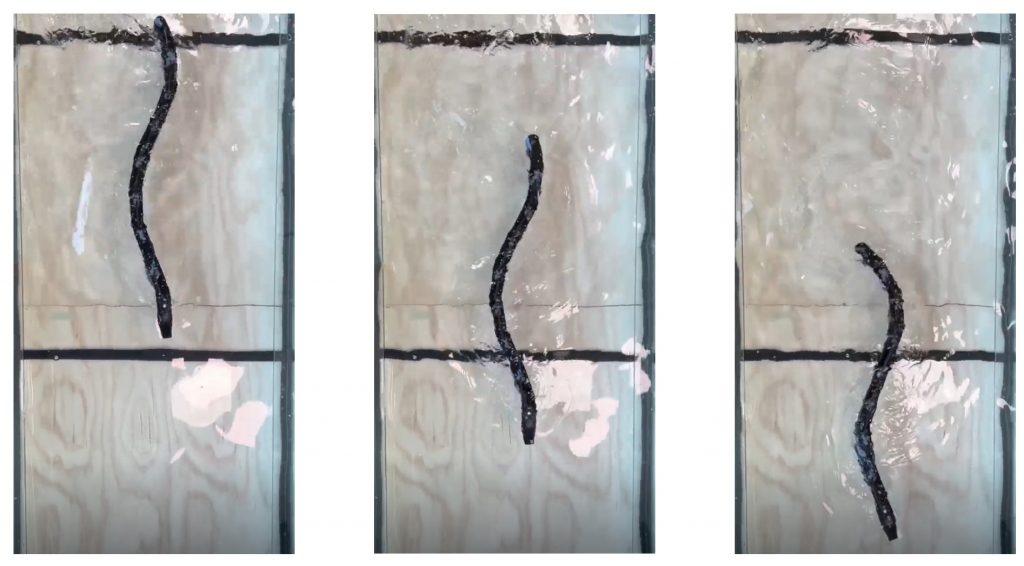
Aquatic robots inspired by snakes or eels can move with extreme agility and maneuverability, and are able to swim through narrow spaces and confined environments, opening the possibility to use these robots for environmental monitoring, search and rescue or infrastructure inspection. This robot is composed of nine modules that move generating a wave traveling from the head to the tail, which pushes water backwards, propelling the snake robot. The objective of this thesis is to design a control algorithm to generate the movement based on Central Pattern Generator (CPG), which is a neuronal circuit able to generate rythmic outputs. This thesis is for 2 students and the experiments will be conducted at the Bioinspired Robotics Lab @ PoliMi Lecco.